Agencija 29.12.2017 "Interfaks-AVN", nova kontrolisana padobranska platforma teška do četiri tone, koju razvijaju brojni ruske kompanije, obezbediće visoku tačnost isporuke robe do određene tačke. Interfaks-AVN je o tome u petak obavešten u vojno-industrijskom kompleksu.
Američko kontrolirane padobranske platforme Joint Precision Airdrop System (JPADS) u letu (c) Američka vojska
"Ova padobranska platforma bi trebalo da se koristi za isporuku tereta u interesu Vazdušno-desantnih snaga, kao i drugih struktura", rekao je sagovornik agencije.
Prema njegovim riječima, sistem automatskog upravljanja će omogućiti padobranskom sistemu visoka tačnost izvršiti slijetanje u datu tačku na površini zemlje minimalnom mogućom horizontalnom i vertikalnom brzinom.
„Kontrola će se tokom čitavog leta vršiti u automatskom režimu. Moguće je menjati koordinate tačke sletanja tokom leta preciznost sa vjerovatnim kružnim odstupanjem od 100 m”, rekao je sagovornik agencije.
On je rekao da su u radu na projektu uključeni Aviokompleks S.V.Iljušina, Istraživački institut za aeroelastične sisteme, kompanije Universal i Aviatrans.
Prema mišljenju ruskog stručnjaka za oblast bespilotnih sistema Denisa Fedutinova, relevantnost ovog zadatka je zbog potrebe da se poboljša tačnost prilikom isporuke robe, što često nije obezbeđeno postojećim tehničkim sredstvima.
"Kada uspješna implementacija ovaj projekat možemo pretpostaviti mogućnost korišćenja ove platforme ne samo za rešavanje problema sa kojima se suočavaju Oružane snage Rusije uopšte i posebno Vazdušno-desantne snage, već i druge strukture, na primer, Ministarstvo za vanredne situacije“, rekao je D. Fedutinov.
Komentar bmpd. Upravljane teme padobranske platformeŠiroko se razvija u inostranstvu, gde je već stvoren značajan broj ovakvih sistema, uključujući i one koji su našli primenu u zapadnim oružanim snagama. Konkretno, aktivno se primjenjuje porodica vođenih padobranskih sistema Sherpa kanadske kompanije MMIST, koje koristi američki marinski korpus u Iraku od 2004. godine, a kojima upravljaju i oružane snage niza NATO zemalja. Sherpa sistem omogućava korištenje padobranskih platformi teških do 10 hiljada funti (4500 kg). Sherpa se može koristiti i sa motorom.
Od 2006. godine, američka vojska i zračne snage upravljaju zajednički razvijenim Joint Precision Airdrop System (JPADS), komercijalno proizveden od strane Airborne Systems North America (američka podružnica britanske kompanije Airborne Systems) i čije varijante dozvoljavaju korištenje padobranskih platformi. težine do 40 hiljada funti (18 tona) (iako u stvari američko ratno vazduhoplovstvo kupuje sisteme sa opterećenjem do 10 hiljada funti - 4500 kg). Navodi se da je "prag" preciznosti isporuke tereta za lake verzije platformi JPADS 150 m, a za platformu od 10 hiljada funti - 250 m, američka vojska takođe koristi vođene padobranske platforme Screamer 2K Jaka preduzeća od 2007. u Afganistanu, težine do 2000 lbs (900 kg).
Od 2016. godine američka vojska testira verzije vođenih padobranskih platformi JPADS sa optičko-korelacionim sistemom navođenja umjesto satelitskog, koji bi trebao eliminirati neprijateljske smetnje GPS prijemnicima i povećati preciznost isporuke.
ZVO br. 5/2007, str. 46-51
AMERIČKI PADOBNI SISTEM “ONYX”
Kapetan 2. ranga S. PROKOFIEV
Jedna od karakteristika borbenih dejstava u savremenim uslovima, što se jasno pokazalo u vojnim operacijama u Afganistanu i Iraku, bila je rasprostranjena upotreba jedinica specijalnih snaga (SPU) u svim fazama nastanka i razvoja sukoba. Jedan od glavnih metoda dovođenja jedinica specijalnih snaga u područje borbenog zadatka bio je i ostao padobransko desant. Ubuduće će im dostava neophodnog tereta biti organizovana vazdušnim putem pomoću padobranskih kargo sistema (PGS).
Ovaj članak započinje seriju publikacija koje pokrivaju razvoj padobranskih sistema i opreme za sletanje snaga specijalne operacije NATO zemlje.
Tokom borbenih operacija u Afganistanu i Iraku od oktobra 2001. do jula 2004. godine, komanda američke vojske je 27 puta, danju i noću, koristila razna desanta. Od toga, sedam je bilo padobransko, uključujući jedan sa slijetanjem sa velike visine i velikim kašnjenjem u otvaranju padobrana, ostali su iz helikoptera metodom sletanja. Oni su bili bazirani na jedinicama i jedinicama vazdušno-desantne trupe i snage za specijalne operacije. Osim toga, sletanja, uključujući padobranske, koristile su komande marinaca i specijalne operacije američke mornarice.
Na primjer, u junu 2004. godine, noćni padobranski napad američkih marinaca iskrcao se u Irak s ciljem organiziranja zasjede duž ruta vjerovatnog napredovanja konvoja s oružjem i municijom za snage otpora. Prvo je iz aviona KC-130 izbačena izviđačka grupa sa visine od preko 3.000 m i na udaljenosti od nekoliko kilometara od mjesta sletanja. Izbacivanje je izvršeno pomoću kontrolirani padobranski sistemi (UPPS) sa trenutnim raspoređivanjem padobrana. Nakon sletanja, izviđači su pregledali mjesto sletanja, postavili osmatračnice po obodu i postavili radio-farove kako bi osigurali ciljano spuštanje padobranaca. Glavni dio desanta (oko 60 ljudi) spušten je sa visine od oko 300 m sa dva helikoptera CH-46E.
Trenutni planovi rukovodstva Oružanih snaga SAD predviđaju povećanje broja snaga za specijalne operacije (SSO). Planirano je formiranje jednog dodatnog bataljona u grupama specijalnih snaga (vazdušno-desantnih) kopnenih snaga, te jednog dodatnog odreda izviđačkih ronilaca specijalnih snaga u grupama specijalnih snaga Ratne mornarice. Početkom oktobra 2006. godine završeno je formiranje Komande za specijalne operacije američkog marinskog korpusa, koju čine dva bataljona specijalnih snaga i jedinice za podršku ukupan broj 2.500 ljudi. Sva vojna lica ovih jedinica moraju da skaču padobranom. Slične organizacione i kadrovske aktivnosti, iako u manjem obimu, sprovode saveznici SAD u NATO-u, prvenstveno Velika Britanija, Francuska, Njemačka, Holandija i Norveška.
Strani stručnjaci napominju da su se tokom proteklih decenija promijenili pogledi na metode desanta padobranaca specijalnih snaga. Posebno se povećao broj vojnog osoblja SOF-a, za koje je glavni vazdušni način transporta do područja misije postao NANO (High Altitude High Opening) i HALO (High Altitude Low Opening) metode sletanja na veliku visinu kašnjenje otvaranja padobrana").
Na primjer, kasnih 1990-ih, svaki bataljon specijalnih snaga američke vojske imao je samo jedan stalni operativni odred "Alpha" (12 ljudi), a odred specijalnih snaga mornarice je imao jedan vod (16 ljudi), čije je osoblje prošlo specijalne obuku, snabdeven je sa UPPS-om i pripremljen za izvršavanje borbenih zadataka korišćenjem gore navedenih metoda sletanja.
Trenutno su za desant ovim metodama spremna tri stalna Alfa odreda (jedan po četi) u bataljonu specijalnih snaga i dva voda u odredu specijalnih snaga mornarice. Novoformirani bataljoni Specijalnih snaga marinaca uključivali su bivše čete dubokog izviđanja MP divizije (po oko 100 ljudi), čije je osoblje u potpunosti osposobljeno za padobranske skokove sa velike visine.
Prema riječima stranih stručnjaka, korištenje ovih metoda desanta povećava tajnost djelovanja jedinica specijalnih snaga, jer ne dozvoljava neprijatelju da pouzdano precizno odredi mjesta slijetanja, pa čak i otkrije samu činjenicu iskrcavanja. Štaviše, s obzirom na savremeni razvoj sredstava vazdušna odbrana, ova metoda smanjuje vjerovatnoću gubitaka vojno-transportnih aviona od vatre iz zemaljskih PVO sistema, jer omogućava sletanje sa velike visine bez ulaska aviona u područje pokrivanja neprijateljskih zemaljskih PVO sistema.
Komanda SOF-a američke mornarice planira da svaki ronilac za izviđanje, kao i član posade čamaca tipa RJB-11 koji mogu sletjeti na vodu, prođu obuku za sletanje pomoću UPPS-a. Za potonje, to znači da mogu pljuskati u neposrednoj blizini čamca i nakon toga brzo doći do njega. U tu svrhu organizovani su stalni kursevi padobranskih skokova sa visine u Centru za obuku mornaričkih specijalnih snaga u Mornaričkoj bazi Coronado, budući da mesta koja se godišnje izdvajaju za Specijalne snage mornarice u Interservisnom centru za obuku u skokovima sa velike visine Yuma nisu dovoljna. osposobiti potreban broj vojnog osoblja ovih formacija. Zanimljiva je činjenica da obuku u ovom centru provode stručnjaci iz GPS World-a, sa kojim je Komanda za specijalne operacije mornarice sklopila odgovarajući ugovor, odobravajući program i metodologiju obuke. Osim toga, ova kompanija po drugom ugovoru sa istom komandom proizvodi i isporučuje razne vrste UPPS-a.
Drugi trend koji se pojavio posljednjih decenija je povećanje letne težine vojnog osoblja jedinica specijalnih snaga pri padobranskom spuštanju, što je određeno ukupnom težinom samog padobranca, njegovog naoružanja i opreme koja je padobranom srušena s njim, kao i vlastitu težinu padobranca. Na primjer, čak i tokom operacije Pustinjska oluja, težina naoružanja i opreme vojnog osoblja SOF-a u nekim slučajevima je dostizala 90 kg.
Trenutno, na osnovu stečenog iskustva i novonastalih zadataka, prvenstveno u Sjedinjenim Američkim Državama i nekim zapadnoevropskim zemljama, aktivno je u toku razvoj padobranskih sistema i opreme za sletanje (PS i SD), kao i rad na poboljšanju tačnosti ispuštanja. ljudi i tereta u interesu operacija specijalnih snaga. Na primjer, jedan od smjernica NATO-a (DAT-5-Ref.: AC/259-D(2004)0023 Final) identificira 10 najvažnijih oblasti razvoja oružja i vojne opreme boriti se međunarodni terorizam. Jedan od njih (tačka 5) je: „Razvoj visoko preciznih PS i SD za MTR.“ Finansiranje istraživanja i razvoja u ovim oblastima se takođe povećava. Tako je Ministarstvo odbrane SAD 2005. godine za ove namjene izdvojilo 25 miliona dolara, što je skoro 7 puta više nego 1996. godine.
Istovremeno, prema stranim stručnjacima, razvoj uspio klizeći padobranski teretni sistemi(UPPGS) je najperspektivniji pravac za razvoj dijabetesa. Uz njihovu pomoć može se izvršiti precizna i tajna dostava tereta jedinicama specijalnih snaga koje djeluju na područjima okupiranim od strane neprijatelja. Ovi sistemi se mogu koristiti i za pružanje pomoći u navigaciji grupama specijalnih snaga (UPPGS igra ulogu „vođe“ ili „prezentatora“ za izviđačke grupe koje sleću za njim na UPS, ili se uz njegovu pomoć postavljaju svetlosni farovi za označavaju mjesta slijetanja ili primanja tereta u mraku). Osim toga, mogu se koristiti u izvođenju psiholoških operacija (raspršivanje propagandnih letaka i drugog propagandnog materijala u strogo određenim područjima). Takva sredstva mogu biti tražena ne samo u vojnoj oblasti, već iu civilnom sektoru, na primjer, kada se pruža pomoć žrtvama prirodnih katastrofa ili katastrofa uzrokovanih ljudskim djelovanjem koje rade u nepristupačnim planinskim ili sjevernim područjima, kada ne postoji drugi način da se brzo i precizno im dostaviti potrebnu robu ili će njihova dostava bilo kojim drugim načinom osim zračnim potrajati.
UPPGS kombinovani tip"oniks" razvijen od strane Atair Aerospace (New York) kao dio programa za finansiranje istraživanja i razvoja za mala preduzeća u Natick Research Centru i US Special Operations Command. Od oktobra 2005. godine obavljeno je preko 200 letnih testova UPPGS-a.
Sistem Onyx je dizajniran za ispuštanje tereta težine leta do 1.000 kg sa visina do 10.700 m nadmorske visine iz aviona i helikoptera sa instaliranom rolo stolnom opremom metodom samoizbacivanja (kada avion ima pozitivan ugao od napad i odvajanje tereta pod uticajem gravitacije) pri naznačenoj brzini aviona do 278 km/h na udaljenosti do 44 km od naznačene tačke sletanja metodom NANO ili HALO pomoću padobranske mašine. Srednja kvadratna greška sletanja sa određene tačke ne prelazi 50 m.
Posebnost Onyx UPPGS-a je upotreba dva padobranska sistema koji rade uzastopno u različitim fazama smanjenja opterećenja: sistem kontrolisanog kliznog padobrana sa brzokretnom kupolom eliptičnog oblika u tlocrtu i padobranski sistem za nekontrolisano sletanje sa okruglom teretnom kupolom dizajniranom za sigurno sletanje padobranskog objekta.
Kompanija je razvila tri tipa UPPGS-a: “Onyx 500” (letna težina 34-227 kg), “Onyx 2200” (227-1.000 kg) i “Micro Onyx” za sletanje malih tereta težine do 9 kg.
Kupola UPPGS “Onyx 500” je dvoljuska. Kočiona površina kupole je 11,15 m2, raspon je 3,65 m Težina padobranskog sistema u sklopljenom stanju i upravljačke jedinice padobrana (PCU) je 16,34 kg. Površina kupole s dvije školjke Onyx 2200 UPPGS je 32,5 m2, raspon je 11,58 m. Površina kupole sistema za slijetanje je 204,3 m2 (opremljen uređajem za valovanje tipa Sombrero, proizveden. od Butlera). Težina padobranskog sistema sa jedinicom za upravljanje letom je 45 kg. Aerodinamički kvalitet oba UPPGS-a je 4,5.
Padobranski sistem se aktivira kablom za prisilno aktiviranje padobrana aviona. Postavljanje kliznog sistema odvija se prema kaskadnoj šemi: prvo se aktivira stabilizirajući padobran, koji osigurava da se opterećenje smanji na zadatu visinu ili u zadatom vremenu, a zatim, nakon što se aktivira padobranska automatika, glavni nadstrešnica sistema je puštena u rad. Padobranski automatski uređaj Onyx sistema izrađen je na bazi standardne elektronske pirotehničke sigurnosne padobranske naprave. Nakon što je glavna padobranska nadstrešnica naduvana, stabilizirajući padobran se nalazi iznad i iza glavne nadstrešnice padobrana i ne ometa njegovu kontrolu tokom spuštanja.
Uređaj za rebrast, dizajniran da smanji dinamička opterećenja pri otvaranju glavne kupole sistema planiranja, osigurava postepeno punjenje dijelova kupole: prvo središnjih, zatim bočnih. BUP osigurava automatsko lansiranje Onyx UPPGS-a do tačke aktiviranja sistema za sletanje duž zadate putanje spuštanja (moguće je koristiti nekoliko okretnih tačaka rute, spuštajući se u strmoj spirali). Nakon oslobađanja, UPPGS se okreće prema cilju i klizeći mu se približava, postepeno se spuštajući do tačke spuštanja, koja se nalazi iznad navedene tačke sletanja na visini od 1.370 m iznad terena. UPPGS tada počinje spuštanje u strmoj spirali, opisujući spiralu prečnika 80 m, koja se sužava kako se približava tlu. Prosječna brzina horizontalnog klizanja je 41 m/s, vertikalna brzina pri spiralnom spuštanju je 62 m/s. Na nadmorskoj visini od 125-175 m iznad terena iznad zadate tačke sletanja, sistem za sletanje se razmješta pomoću pilot padobrana, a teret slijeće na okruglu kupolu. Tačka puštanja u rad sistema za slijetanje izračunava se digitalnim kompjuterom BUP na brodu u realnom vremenu, uzimajući u obzir zanošenje vjetra. PDU, padobranski automatski, kao i nadstrešnice kliznog padobranskog sistema (GPS) ostaju na spojnoj vezi tokom faze sletanja i mogu se koristiti za ponovnu upotrebu.
Kačenje kupola UPPGS "Oniks 2200" na opterećenje
PPS kupola"Onyx" sistem je napravljen od kompozitnog materijala With nultu propusnost vazduha, razvijen od strane Atair Aerospace. To je troslojni materijal. Tokom proizvodnje, sloj visokomodulnog ojačane tkanine se prekriva tankim polimernim filmom, impregnira i obrađuje vrućim pritiskom. Budući da se kompozitna tkanina ne proizvodi tradicionalnom metodom tkanja, ne podliježe savijanju, valovitosti, tkanju i može se postaviti pod bilo kojim kutom tokom procesa proizvodnje i u početku poprimiti tražene geometrijske oblike. Platna od kompozitnog materijala mogu se šivati, spajati ultrazvučnim zavarivanjem ili hemijski pomoću ljepila.
Novi materijal je tanji, 3 puta jači, 6 puta manje rastezljiv i 68 posto fleksibilniji. Lakši od tradicionalnih najlonskih materijala sa dvostrukim okvirom i nulte prozračnosti koji se koriste za izradu nadstrešnica modernih PPS-a kojima se može upravljati. Otpor nadstrešnice za padobran napravljen od kompozitnog materijala Atair Aerospace je znatno manji. Upotreba takvog materijala omogućila je programerima Onyx sistema da smanje površinu PPS kupole i, posljedično, značajno povećaju njeno opterećenje. Istovremeno, za 65 posto. aerodinamički kvalitet je povećan. Nadstrešnica padobrana od kompozitnog materijala nema na sebi ušiven armaturni okvir od trake visoke čvrstoće, kao na konvencionalnim nadstrešnicama. Ima manji volumen u odnosu na nadstrešnicu iste površine napravljenu od tradicionalnih materijala kao što su F-111 ili ZP. Karakteristike performansi kupole su također povećane. Ne upija vlagu, nije pod utjecajem ultraljubičastog zračenja i sunčevo zračenje, ne stvrdnjava se i može se skladištiti više od pet godina, spreman za upotrebu.
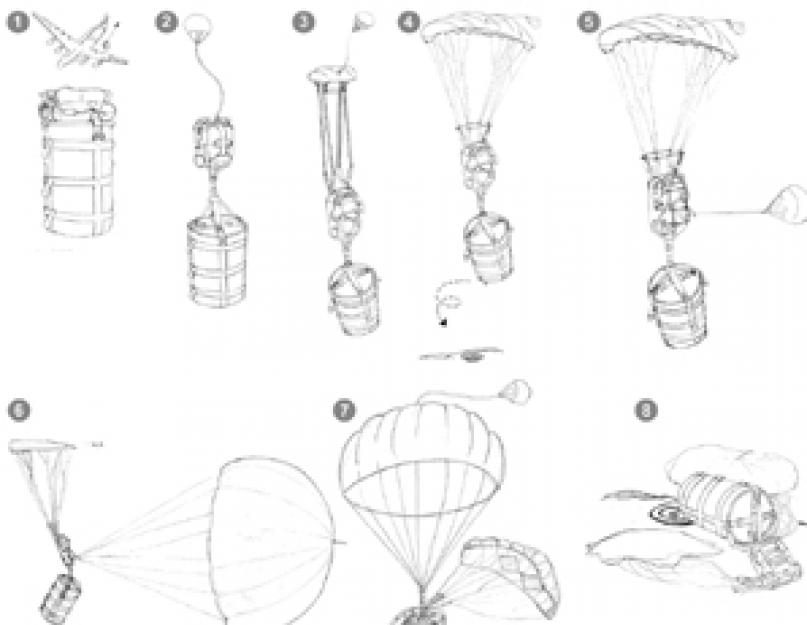
Spuštanje UPPGS "Oniks":
1 - odvajanje UPPGS-a od aviona, postavljanje stabilizacionog padobrana;
2 - spuštanje sa stabilizirajućim padobranom; 3 - otvor glavne kupole UPPGS-a;
4 - spuštanje na glavnu kupolu; 5 i 6 - otvor teretne nadstrešnice desantnog padobranskog sistema; 7- spuštanje teretnim padobranom; 8- sletanje
Kompanija je 2005. godine uložila 2,5 miliona dolara sopstvenih sredstava za izgradnju fabrike za proizvodnju novog kompozitnog materijala za padobrane. Međutim, glavni nedostatak sprečavanje široka primena Ovaj materijal za proizvodnju raznih padobranskih sistema trenutno je njegova cijena: 5 puta je skuplji od standardnih materijala.
Kontrolna jedinica leta UPPGS"Onyx" uključuje: ugrađeni računar sa 32-bitnim procesorom; inercijalni navigacioni sistem (SINS), korigovan svemirskim radio signalima navigacijski sistem(KRNS) NAVSTAR, i pneumatski pogon za PPS kontrolne priveznice. Bord kompjuter obrađuje sledeće podatke: horizontalni domet do tačke sletanja; barometar nadmorske visine; PGS kurs; visina izračunata pomoću CRNS-a; brzina vjetra; brzina spuštanja; brzina tla; linija staze; podbaciti/prebaciti cilj; kosi raspon do tačke sletanja; očekivano vrijeme sletanja. SINS uključuje: trokoordinatni žiroskop, akcelerometar, magnetometar i barometarski visinomjer. 16-kanalni CRNS prijemnik ažurira podatke sa frekvencijom od 4 Hz i određuje koordinate pokretnog objekta sa tačnošću od 2 m. Dimenzije SINS-a su 3,81 x 5,08 x 1,9 cm, težina 42,5 g kućište od karbonskih vlakana veličine 10,6 x 12,7 x 5 cm uključujući SINS. Upravljačka jedinica ostaje u funkciji u temperaturnom rasponu od -50 do +85°C i visinama do 17.670 m. Napajanje se vrši iz litijum-jonske baterije od 12 V, čiji je neprekidni rad 6 sati.
Misija leta za UPPGS je razvijena pomoću sistema za planiranje misije leta (FPS), kreiranog od strane stručnjaka kompanije i kompatibilnog sa jedinstvenim FPS-om. Omogućava vam da bežično unesete misiju leta u UPPGS bilo koje vrste prije nego što je ubacite u avion ili u nju unesete pomoću avionike u zraku. Misija leta može se snimiti na prijenosnom mediju za pohranu. Pomoću SSPS-a moguće je izvršiti analizu rada svih dijelova i mehanizama UPGS-a nakon leta.
Upravljačka jedinica omogućava korištenje Onyx UPPGS-a bez upotrebe posebnog sistema zaštite pri spuštanju tereta sa srednje visine i male udaljenosti do mjesta slijetanja. Unaprijed se specificiraju samo masa tereta i koordinate točke slijetanja. Nakon ispuštanja UPPGS-a iz aviona, jedinica za kontrolu leta obrađuje primljene podatke u realnom vremenu i dovodi sistem do određene tačke sletanja. Konkretno, u junu 2004. godine, na poligonu Natick Research Center za predstavnike američke vojske, izvedena su demonstracijska ispuštanja UPPGS-a bez upotrebe SPZ-a. Izvedeno je ukupno 10 padova sa visine od 3.000 m iznad terena i udaljenosti od 1,8-5,5 km od predviđene tačke sletanja. Početna tačka izdanja odabrana je proizvoljno. Srednja kvadratna greška pri slijetanju iznosila je 57 m (maksimalno odstupanje od zadate tačke slijetanja 84 m, minimalno 7 m).
U decembru 2004. godine obavljena su ispitivanja na poligonu Iloy (Arizona). testovi letenja adaptivni sistem međupadobranska navigacija (IPN) tokom serijskog izdanja Oniks UPPGS-a u cilju testiranja informacionih i kontrolnih algoritama SMPS-a za upravljanje letom grupe UPPGS-a u režimima zajedničkog okretanja u horizontalnoj i vertikalnoj ravni i sistema za sprečavanje konvergencije UPPGS-a u vazduhu. Nakon oslobađanja, pet UPPGS-a je doletjelo do naznačene točke slijetanja kao dio zatvorene grupe ili formacije (u smjeru smjera, nizom pojedinačnih ASG-ova). Za određivanje relativnog položaja, brzina i ubrzanja UPPGS-a u zraku u grupnom letu, na svakom od njih je ugrađena oprema za radio prijenos i prijem podataka (RDL). Informacije su prenošene linijom vazduh-vazduh. Time je osiguran grupni let UPPGS-a do tačke u kojoj se grupa počela raspuštati i manevrirati (otvarati) kako bi se uspostavio siguran interval prije otvaranja sletnog PS. Tokom ovih ispitivanja testirane su tri metode kontrole leta UPPGS grupe.
Prvi način sastoji se u korištenju jednog od sistema kao vodećeg („lidera“). Istovremeno je pratio nominalnu putanju, a u putnim računarima podređenih sistema generisana je informacija uzimajući u obzir podatke prenete putem radara o relativnim ubrzanjima, uglom putanje i ugaonim brzinama vodećeg sistema. , a svi ostali su krenuli za “vođom”. Međutim, ova metoda, prema riječima stručnjaka iz kompanije Atair Aerospace, ima veliki nedostatak: u slučaju kvara vodećeg UPPGS-a ili kratkotrajnog kvara u radu njegove kontrolne jedinice, može doći do gubitka kontrole nad svim sistemima. pojaviti.
Drugi način podrazumeva korišćenje „virtuelnog lidera“, kada je isti program unet u kontrolnu jedinicu svih UPPGS-a i oni su leteli, stalno prateći svoju poziciju u odnosu jedan prema drugom, održavajući zadati interval i udaljenost. Tokom razmene informacija između UPPGS-a, njihovi kontrolni sistemi su razvili putanju leta koja je najtačnije odgovarala zadatoj i pratili je. Kod ove metode ne postoji određeni „vođa“. Prednost ove metode, prema američkim stručnjacima, je neovisnost rada kontrolne jedinice svakog UPPGS-a. Odlazak jednog ili više njih sa programirane putanje ne utiče na let preostalih sistema u grupi. Istovremeno, ovaj način rada SMPN-a zahtijeva dobro ispravljen i pouzdan radarski procesor podataka, brzi procesor i složen softver.
Treći način decentralizovano, je kako slijedi. U upravljačku jedinicu svakog UPGS-a unosi se isti program leta, ali se informacije razmjenjuju samo sa dva ili tri najbliža sistema u grupi, od kojih ih jedan, pak, razmjenjuje sa UPGS-om druge mini-grupe. Ova metoda kontrole omogućava SMPN-u da uspješno manevrira grupom UPPGS-a: zatvaranje, otvaranje, mijenjanje traka kako bi se izbjegle prepreke, skretanje na različite lokacije za slijetanje ili raspuštanje grupe prije slijetanja na jednu od njih i, prema stranim stručnjacima, najviše obećava.
Prema riječima stručnjaka iz kompanije Atair Aerospace, SMPN koji su razvili omogućava let i bezbedno sletanje grupe od 5-50 Onyx sistema u dometu od preko 55 km do jednog ili više razmaknutih mesta za sletanje.
Komanda za specijalne operacije SAD je 2005. godine kupila pet Onyx 500 UPGGS za probni rad, a u septembru 2006. potpisan je ugovor vrijedan 3,2 miliona dolara za nabavku 32 sistema različitih tipova.
Napominje se da korištenje dvije uzastopno radeće trafostanice na Onyx-u pruža niz prednosti u odnosu na one s jednom kupolom. Upotreba PPS-a za sletanje omogućila je programerima da se usredsrede na poboljšanje brzinskih kvaliteta njegove nadstrešnice. Osim toga, nije bilo potrebe za složenim kontrolnim algoritmima za sigurno slijetanje tereta na PPP, što je dovelo do pojednostavljenog softvera i smanjilo njegovu cijenu. Visoke horizontalne i vertikalne brzine smanjile su vrijeme koje je UPPGS proveo u zraku za 10 puta u odnosu na padobranske sisteme sa okruglom baldahinom ili UPPGS, čija je kupola napravljena od tradicionalnih materijala, kada se padne sa iste visine i, samim tim, vjerovatnoća njihovog otkrivanja u vazduhu od strane neprijatelja. Istovremeno, letačko-tehničke karakteristike PPS-a ovog sistema, koje su 2-3 puta veće od letačko-taktičkih karakteristika vazdušno-desantnog PPS-a u službi specijalnih snaga, ne dozvoljavaju njegovu upotrebu za sletanje. osoblje jedinice specijalnih snaga kao „vođa“.
Prema američkim vojnim smjernicama, NANO i HALO metode slijetanja znače da se odvajanje od aviona događa na visini od najmanje 18.000 stopa (5.486 m) iznad nivoa mora. HALO metoda raspoređuje padobran na visini od najmanje 3.500 stopa (1.066 m) iznad nivoa tla. Za NANO metodu, kašnjenje otvaranja padobrana ne bi trebalo da prelazi 12 s.
Da biste komentarisali, morate se registrovati na sajtu.
Kuyanov A.Yu.
Kontrolisani klizeći teretni sistem (UCGS) "Onyx"
UPGS "Onyx" (slika 1), dizajniran za iskrcavanje tereta težine od 34 do 1000kg sa visina do 10,7 km, do ograničenih područja, noću i u uslovima loše vidljivosti, u potpuno autonomnom režimu.
Slika 1 -UPGS "Onyx"
Princip rada Onyx UPGS-a prikazan je na slici 2, gdje su sljedeće faze označene brojevima:
1. Odvajanje od aviona.
2. Uvođenje stabilizirajućeg padobrana.
3. Uvođenje glavnog klizajućeg padobrana.
4. Onyx on-board kompjuter usmjerava UPGS do određene točke slijetanja.
5. Ubacivanje padobrana za sletanje na minimalnoj sigurnoj visini.
6. Kratkotrajno spuštanje pomoću dva padobrana.
7. Spuštanje sletnim padobranom.
8. Meko i precizno sletanje.

Slika 2– Princip rada UPGS „Oniks“
Prednosti i taktičko-tehnički podaci UPGS "Onyx":
– omogućava sletanje tereta od 34 do 1000kg ;
– visok nivo tačnosti sletanja – prosečna tačnost 75 m ;
– raspon radne temperature od -50 do + 85 C ;
– aerodinamički kvalitet - 4,5;
– modularni dizajn sistema osigurava jednostavnu upotrebu;
– rešenje za korišćenje dva padobranska sistema omogućava smanjenje vremena sletanja za 10 puta u poređenju sa osi simetričnim padobranskim sistemom sa jednom kupolom;
– upotreba stabilizirajućeg padobrana omogućava smanjenje dinamičkih opterećenja u momentu puštanja kliznog padobrana u rad;
– mogućnost višekratne upotrebe klizećih i sletnih padobrana;
– mali kompjuter je povezan na GPS, koji je sposoban da snima podatke o letu;
– pouzdani pneumatski upravljački pogoni;
– ubacivanje padobrana za sletanje vrši se na minimalno dozvoljenoj visini;
– sistem za izbegavanje sudara u vazduhu;
– osnovni računar omogućava prilagođavanje rute leta u realnom vremenu putem komunikacijske linije;
– korekcija rute leta uzimajući u obzir promjene jačine i smjera vjetra (ovi podaci se unose prije slijetanja);
– softver prilagođava potrebno opterećenje krila u zavisnosti od mase tereta koji se ispušta i eliminiše asimetriju krila u letu.
Programeri Onyx UPGS-a napominju da upotreba dva uzastopna padobranska sistema pruža niz prednosti u odnosu na one s jednom kupolom. Upotreba padobranskog sistema za slijetanje omogućila je programerima da se usredotoče na poboljšanje brzinskih karakteristika nadstrešnice. Pored toga, eliminisana je potreba za složenim kontrolnim algoritmima za bezbedno sletanje tereta na sistem padobrana za sletanje, što je rezultiralo pojednostavljenim softverom i smanjenim troškovima. Visoke horizontalne i vertikalne brzine smanjile su vrijeme zadržavanja UPGS-a u zraku za 10 puta u poređenju sa padobranskim sistemima sa osovinsko simetričnom nadstrešnicom, čime se smanjuje vjerovatnoća da će UPGS biti otkriven u zraku od strane neprijatelja. Istovremeno, karakteristike letenja UPGS-a ovog sistema su 2-3 puta veće od taktičkih karakteristika letenja vazdušno-desantnih padobranskih sistema tipa krila koji su u službi snaga za specijalne operacije, što ne dozvoljava njegovu upotrebu. kao "vođa" prilikom desanta osoblja jedinica specijalnih snaga.
Pa ipak, upotreba okruglog padobrana za slijetanje smanjuje pouzdanost i pouzdanost rada, povećava pokazatelje težine i veličine i komplicira rad cijelog Onyx UPGS-a.
Možda je ova odluka prvenstveno posljedica nemogućnosti (složenosti) programera Onyx UPGS-a da implementiraju dinamičko kočenje ili aerodinamičku detonaciju.
Trenutno su razvijeni UPGS u kojima je implementiran DT princip za postizanje zadate brzine slijetanja PS-a.
Književnost
1 http://www.extremfly.com.
2 S. Prokofjev “Američki padobranski sistem “Oniks” – strani vojni pregled №5 2007.
Sistem osigurava vraćanje opreme na zadatu tačku i eliminiše direktno učešće osobe u dijagnosticiranju područja opasnih po ljude. Sistem se može koristiti na različite načine vremenskim uvjetima i to u različito doba dana, više puta. Sistem sadrži klizni padobran sa teretnom platformom, jedinicu za detekciju farova, komandnu jedinicu, jedinicu za upravljanje padobranskim linijama, inercijalni navigacioni sistem, jedinicu za generisanje kontrolnih signala za uključivanje (isključivanje) i podešavanje. početni uslovi za inercijalni navigacioni sistem i dijagnostičku jedinicu za područje Zemljine površine. 9 ill.
Pronalazak se odnosi na vazduhoplovnu tehnologiju, posebno na kontrolisane padobranske sisteme, koji se mogu koristiti u različite svrhe: za dostavu tereta u teško dostupna područja, područja prirodnih katastrofa, nesreća, za dijagnostiku i izviđanje raznim oblastima itd. Sa sve većim brojem ekoloških katastrofa, poput nesreće u Černobilu, zagađenja šuma i polja, tundre i tajge vojnim otpadom i naftom, nameće se zadatak tačne dijagnoze i izviđanja različitih područja. zemljine površine bez ljudske intervencije zbog nepristupačnosti i/ili štetnih efekata. Poznata su sredstva za dopremanje mjerne i dijagnostičke opreme pomoću helikoptera, čiji je nedostatak mogućnost da osoba dođe u opasna stanja (radioaktivno zračenje i sl.). Poznata su sredstva za isporuku opreme pomoću sondi i raketa, nedostatak takvih sistema je potreba za telemetrijskom ili povratnom jedinicom, što je teško izvesti u teško dostupnim područjima. Ovi problemi se mogu riješiti korištenjem kontroliranog padobranskog sistema. Poznat je klizeći padobranski sistem za transport korisnog tereta (US patent N 4865274, klasa B 64 D 17/34, aplikacija 29.04.88. - prototip), koji sadrži padobran u obliku krila, upravljačku jedinicu padobranske linije za presvlačenje stanje krila i putanja leta. Ovaj dizajn ne osigurava tačnu isporuku tereta. Kontrolisani padobranski sistem je poznat po dopremanju različitog tereta u teško dostupna područja prirodnih katastrofa, nesreća i sl. (RF patent N 2039680, klasa B 64 D 17/34, aplikacija 08.06.93.), koji sadrži klizni padobran, sistem ovjesa, teretna platforma i kontejner za kontrolu padobranske linije. Upravljanje vrši komandna jedinica u skladu sa zadatim operativnim programom stvaranjem kontrolnih preopterećenja zatezanjem remena na osnovu analize informacija o faru koji se nalazi na mestu sletanja tereta. Analizu informacija vrši jedinica za detekciju farova koja se nalazi na teretnoj platformi, povezana sa komandnom jedinicom, čiji je jedan izlaz povezan sa kontrolnom jedinicom padobranskih linija, a drugi povratnom spregom na jedinicu za detekciju farova. Ovisno o prisutnosti svjetionika jedne ili druge vrste na mjestu slijetanja, na platformu se instalira odgovarajući tip senzora, izrađen u modularnoj verziji. Mogu se koristiti senzori beacon bazirani na različitim fizičkim principima ili koji rade na termalnom kontrastu ili kombinacijama. Detekcija farova se može izvesti pomoću pasivnih detektorskih sredstava, aktivnih (koristeći sisteme za emitovanje i prijem signala) ili poluaktivnih (sa osvetljenjem farova). Međutim, ovaj dizajn, kao i drugi poznati sistemi, ne dozvoljava rješavanje problema autonomnog izviđanja i dijagnostike s vraćanjem platforme sa opremom na zadatu tačku. Problem je riješen korištenjem predloženog upravljanog padobranskog sistema koji je usmjeren na svjetionik postavljen na traženu lokaciju, a ima klizni padobran tipa krila, teretnu platformu, serijski spojenu jedinicu za detekciju svjetionika, komandnu jedinicu, drugu čiji je izlaz spojen na ulaz jedinice za detekciju fara i blok kontrole padobranskih užeta. Kontrolisani padobranski sistem dodatno sadrži serijski povezan inercijalni navigacioni sistem, čiji je drugi izlaz povezan sa drugim ulazom komandnog bloka, blok za generisanje kontrolnih signala za uključivanje/isključivanje i postavljanje početnih uslova za inercijalni navigacioni sistem, čiji je drugi izlaz povezan sa ulazom inercijalnog navigacionog sistema, treći izlaz i drugi ulaz su povezani, respektivno, na drugi ulaz i drugi izlaz jedinice za detekciju fara i jedinice za dijagnostiku Zemljine površine. Let PS po zadatoj putanji vrši se promenom aerodinamičkih parametara prema komandi inercijalnog navigacionog sistema, a skretanje PS na suprotan kurs i sletanje u prostor gde se nalazi far vrši se pomoću mijenjanje aerodinamičkih parametara padobrana prema naredbama iz kontrolne jedinice remena i jedinice za detekciju farova koja traži u zoni slijetanja. Upotreba padobranskog sistema sa povratkom na datu tačku na zemljinoj površini omogućava vam da postignete tačnost sletanja tereta u krugu od 5 - 60 m u zavisnosti od uslova upotrebe, smanjite rizik od štetnih efekata na ljudsko telo, a takođe i koristite sistem u različitim vremenskim uslovima iu različito doba dana mnogo puta i po niskoj ceni. Dakle, postoji nova strukturalna implementacija kontrolisanog sistema, kao i prisustvo neočiglednih veza između blokova sistema, što omogućava realizaciju zadatka dijagnostikovanja područja sa vraćanjem na datu tačku na zemljine površine sa potrebnom tačnošću. Na sl. 1 prikazuje blok dijagram sistema; na sl. 2 - blok dijagram jedinice za detekciju farova za IR opseg; na sl. 3 - blok dijagram komandnog bloka; na sl. 4 - blok dijagram kontrolnog kontejnera padobranske linije; na sl. 5 - blok dijagram inercijalnog navigacionog sistema; na sl. 6-9 - blok dijagram algoritma rada jedinice za generiranje upravljačkih signala za uključivanje/isključivanje i postavljanje početnih uslova za inercijski navigacijski sistem. Kontrolirani padobranski sistem (PS) za dijagnosticiranje datog područja Zemljine površine uključuje klizni padobran 1 s teretnom platformom, sekvencijalno povezanu jedinicu za detekciju svjetionika 2, komandnu jedinicu 3, upravljačku jedinicu padobranske linije 4 (kontrolni kontejner ) i sekvencijalno povezani inercijalni navigacioni sistem 5, jedinica 6 - generisanje kontrolnih signala za uključivanje/isključivanje i postavljanje početnih uslova za inercijalni navigacioni sistem i dijagnostičku jedinicu za područje Zemljine površine 7, dok je drugi izlaz komandnog bloka 3 je povezan na ulaz bloka za detekciju fara 2, drugi izlaz inercijalnog navigacionog sistema 5 je povezan sa drugim ulazom komandnog bloka 3, drugi izlaz bloka 6 je povezan na ulaz inercijalni navigacioni sistem 5, i treći izlaz i drugi ulaz bloka 6 su povezani, respektivno, na drugi ulaz i drugi izlaz bloka za detekciju farova 2. Sistem koristi serijski upravljivi padobran u obliku krila, na primjer UPG-0.1 ili PO-300, te serijsku platformu za postavljanje dijagnostičke jedinice za površinu Zemlje i jedinice za detekciju svjetionika, koja ima elemente za amortizaciju da ublaži udar pri sletanju. Za implementaciju funkcija svojstvenih ovom sistemu
A) upravljanje dijagnostičkom jedinicom za Zemljinu površinu 7 i jedinicom za detekciju farova 2 u skladu sa vremenskim ciklogramom leta i zadacima početnih uslova;
B) upravljanje inercijalnim navigacionim sistemom 5;
B) obrada informacija koje dolaze sa izlaza inercijalnog navigacionog sistema 5
Može se koristiti blok 6 za generisanje kontrolnih signala za uključivanje/isključivanje i postavljanje početnih uslova za inercijalni navigacioni sistem (bord kompjuter). Prednost takvog bloka je mogućnost rekonfiguracije ugrađenog programa iz bilo kojeg tipa IBM-a - 286, 386, 486, u kojem je PS vremenski ciklogram napisan kao program na jeziku visoke razine. Blok za generisanje kontrolnih signala za uključivanje/isključivanje i postavljanje početnih uslova za inercijski navigacioni sistem baziran je na serijskim elementima, na primer 1830 BE31. Ovisno o zadatku, dijagnostička jedinica za područje Zemljine površine 7 može uključivati senzore za mjerenje zračenja (radarski, optički...), kameru, senzor za mjerenje temperature, atmosferskog zagađenja (u vidljivom i infracrvenom). raspon) itd. Inercijalni navigacioni sistem 5 uključuje blok za generisanje kompenzacionih momenata 8, blok inercijalnih elemenata 9, računarski uređaj 10 i može biti projektovan prema sl. 5. Jedinica za detekciju farova 2 - različita u zavisnosti od opsega talasnih dužina, za IR opsege može sadržati IR beacon senzor, koji je žiroskopski uređaj sa elektronskom jedinicom i krugom za skeniranje, mehanizam za pumpanje, jedinicu za ubrzanje rotora žiroskopa za praćenje, ili radio sistem koji uključuje radio far (predajnik signala) i prijemnik radio stanice napravljen prema superheterodinskom kolu sa jednom konverzijom frekvencije (na primjer, serijska radio stanica P-855 A1). Zračenje objekta koji se proučava (požar) fokusira sočivo na stakleni disk-raster sa naizmjeničnim prozirnim i neprozirnim sektorima. U ovom slučaju, broj parova sektora se povećava od ruba do centra sa 6 na 12 komada. Raster je centriran u odnosu na optičku os sočiva i instaliran je zajedno s njim na rotor žiroskopa. Na kardanskom ovjesu potonjeg nalazi se fotodetektor, a između njega i rastera postavljen je svjetlovod. Rotor žiroskopa je trajni dvopolni magnet, čiju frekvenciju fp održava konstantni elektromagnetni sistem. Signal sa fotodetektora prolazi kroz pol filter sa rezonantnom frekvencijom f res = 12 fp, detektuje se, pojačava pojačavačom snage i ulazi u korektor. Kada magnetska polja korekcijskog svitka i rotirajućeg trajnog magneta međusobno djeluju, nastaje mehanički moment pod čijim utjecajem žiroskop vrši precesiju u željenom smjeru, zadržavajući izvor zračenja u vidnom polju. U podešenom režimu praćenja, struja korekcije je proporcionalna ugaonoj brzini linije vida. Iz struje se generiše kontrolna komanda koja odgovara ugaonoj brzini vida. Veza između pokretnog i stacionarnog referentnog sistema povezanog sa rotorom žiroskopa i telom bloka, respektivno, uspostavlja se pomoću namotaja senzora generatora referentnog signala (RSG) i optičke ose jedinice za detekciju fara. Uzdužne ose GON namotaja su okomite na uzdužnu osu kućišta. Za mehanizam pumpanja jedinice za detekciju farova 2 na putanji PS-a, uglovi nagiba i kotrljanja mogu doseći +50 o. Ugao pumpanja rotora za praćenje žiroskopa je 40 o. Zbog toga postaje neophodno okretati jedinicu za detekciju fara dalje duž putanje PS-a kada se žiroskop za praćenje približi strukturnom zaustavljanju i automatsko praćenje objekta (požara) može zatajiti. Dodatni okret osigurava da se graničnik udalji od žiroskopa za praćenje. Mehanizam za pumpanje osigurava rotaciju proizvoda na dva dijela okomite ravni oko osa koje prolaze kroz zavojnice GON-0 o i GON-90 o i središta jedinice za detekciju farova u njegovom poprečnom presjeku. Rotacija oko osi povezanih sa GON kalemom osigurava očuvanje pridruženog koordinatnog sistema. Kolo za skeniranje omogućava kontrolu rotora žiroskopa preko korekcionih zavojnica prema datom zakonu. U detektoru se postavljaju granične vrijednosti za informacijski signal i generira se naredba da se isključi skeniranje, dezorijentira žiroskop za praćenje i započne automatsko praćenje objekta (na primjer, požar). Primjer jedne od izvedbi jedinice za detekciju farova 2 prikazan je na Sl. 2. Senzor za far generiše kontrolni signal proporcionalan ugaonoj brzini linije vida, čija se vrednost izračunava na osnovu signala IR kanala ili radio signala u 2 okomite ravni. Komandni blok 3 sadrži standardne elemente - detektor faznog ležaja, kalkulator razlike nosivog signala, brojač nule ležaja, prekidač za korekciju, uređaj za generisanje upravljačkih komandi i može se izraditi na mikroprocesoru. Primjer jedne od realizacija bloka 3 prikazan je na Sl. 3. Blok dijagram kontrolne jedinice padobrana sa 4 linije (kontrolnog kontejnera) prikazan je na Sl. 4. Proces upravljanja i postavljanja PS na putanju leta i vraćanja na početnu tačku može se predstaviti u obliku sljedećih faza: faza programskog leta PS prema datoj misiji leta; faza skretanja PS na suprotan kurs; faza dovođenja desantnog svjetionika na područje i sletanja PS. Pronalazak se može implementirati na sljedeći način:
Prije leta aviona u blok 6 se unosi zadatak leta za generiranje kontrolnih signala za uključivanje/isključivanje i postavljanje početnih uslova za inercijski navigacijski sistem PS pomoću tastature, koji predstavlja parametre putanje leta, visinu leta iznad dijagnostičko područje i ciklogram vremena leta. Vremenski ciklogram leta obuhvata, zavisno od uslova leta, vreme ili domet početka i kraja rada dijagnostičke jedinice za područje zemljine površine 7, vreme uključivanja jedinice za detekciju far 2 (ako je potrebno) za isticanje dijagnostikovane zone na površini zemlje. Pilot odvodi avion (helikopter) u zadato područje i oslobađa padobranski sistem sa teretnom platformom kroz otvor za teret nosača na bilo koji poznati način, na primjer, pomoću transportera. U trenutku resetiranja počinje odbrojavanje početka PS vremena leta. Nakon stabilizacije PS-a, režim leta počinje duž programirane putanje, koja se izvodi pomoću inercijalnog navigacijskog sistema 5. Signali iz bloka inercijalnih elemenata 9, uključujući akcelerometre i žiroskopske senzore ugaone brzine, obrađuju se u računarskom uređaju 10 i dostavljaju bloku za generisanje kompenzacionih momenata 8. Signali iz bloka inercijalnog navigacionog sistema 5 se dovode u komandni blok 3. U komandnom bloku 3 generišu se signali koji ulaze u upravljačku jedinicu padobranske linije 4 radi zatezanja komandnih vodova (levo, desno) padobrana. Promjena aerodinamičkih karakteristika padobrana dovodi do promjene parametara putanje padobrana, što se odmah bilježi u bloku inercijalnih elemenata 9 pomoću akcelerometara. Prema informacijama iz bloka 9, u bloku 10 se izračunavaju domet i brzina leta, koji se evidentiraju u bloku 6 za generisanje kontrolnih signala za uključivanje/isključivanje i postavljanje početnih uslova za inercijalni navigacioni sistem u funkciji vremena leta. , računa se od nultog trenutka. Kada se dostigne vrijeme ili udaljenost potrebna u misiji leta, iz bloka 6 se prima naredba za uključivanje dijagnostičkog bloka Zemljine površine 7. Dijagnostički blok Zemljine površine 7 se uključuje na osnovu komandi iz bloka 6 za generisanje kontrolnih signala za uključivanje/isključivanje i postavljanje početnih uslova za inercijalni navigacioni sistem ili sa jedinice za detekciju farova 2, ako se u zoni pregleda nalazi jasno vidljiv far (gori šuma itd.). Način aktiviranja jedinice za dijagnostiku Zemljine površine 7 određen je ciklogramom vremena leta koji se sastavlja za svaku specifičnu primjenu PS-a. Kontrola podešenog vremena se vrši u bloku 6 programski. Kontrola datog dometa se vrši prema informacijama iz inercijalnog navigacionog sistema 5 zbog dvostruke integracije ubrzanja PS. Završetak rada uređaja za snimanje, mjerenje i fotografisanje dijagnostičke jedinice za Zemljinu površinu 7 vrši se i sa kompjutera 6. Nakon završetka dijagnosticiranja Zemljine površine, PS počinje da se okreće. na suprotan kurs izdavanjem komande za upravljanje linijama, koja se prenosi na upravljačku jedinicu za padobranske konopce 4, kada se ovim isključuje inercijalni navigacioni sistem 5 i upravljanje ugaonom brzinom linije vida, a PS okreće 180 o. Nakon završenog okreta od 180 o, uključuje se inercijalni navigacijski sistem 5, informacija iz kojeg se šalje komandnoj jedinici 3 za generiranje odgovarajućeg signala za upravljanje priveznicama. Povratak PS-a na zadatu lokaciju fara (sletanje) vrši se programskim letom PS-a po komandi inercijalnog navigacionog sistema 5, a početni uslovi se unose u inercijalni navigacioni sistem iz memorije blok 6. Da bi se eliminisao prelet tačke sletanja u trenutku određenom vremenskim ciklogramom iz bloka 6, daje se komanda za uključivanje jedinice za detekciju farova 2, koja traži far. Kada se pojavi signal sa fara (IR, MM, kombinovani), inercijalni navigacioni sistem 5 se isključuje sa PS kontrole i prebacuje u rezervni režim. Da bi se eliminisala lažna akvizicija svetionika, padobranski sistem mora imati odgovarajući algoritam za kontrolu pristupa svetioniku, na primer, obezbeđivanje dvostrukog prolaza preko fara, organizovanje kombinovane jedinice za detekciju svetionika, čije prisustvo može dramatično povećati otpornost na buku. senzora. Kada identifikuje svetionik, PS se okreće prema svetioniku. Moment okretanja određen je veličinom signala ležaja u pridruženom koordinatnom sistemu. Završetkom skretanja prema svjetioniku počinje faza pokazivanja na svjetionik. Kontrola se vrši pomoću dvije komponente PS korekcijskog signala. Vektor brzine PS-a je uvijek usmjeren duž linije vida svjetionika. Da bi se izbjegla lažna hvatanja svjetionika, padobranski sistem mora dvaput proći preko svjetionika. U trenutku prelaska sistema preko fare, prvi put se aktivira brojač smerova, na osnovu čijeg signala se u komandnom bloku 3 generira naredba za upravljanje linijom koja se prenosi na kontrolnu jedinicu padobranske linije 4, dok se kontrola ugaone brzine linije vida je isključena i PS počinje da se okreće za 360 od fara o. Nakon završenog okreta od 360o, PS leti prema svjetioniku do trenutka drugog prelaska preko objekta. U trenutku fiksiranja brojača ležaja drugog putovanja iznad svjetionika, obje kontrolne linije su zategnute kako bi se ubrzalo spuštanje sistema i postigao zadati ugao nagiba, optimalan za planiranje do svjetionika. Nakon toga slijedi skretanje prema svjetioniku, koje se izvodi kao što je prikazano gore. Ako beacon nije uhvaćen, informacije iz inercijalnog navigacionog sistema 5 se analiziraju u bloku 6 za generisanje kontrolnih signala za uključivanje/isključivanje i postavljanje početnih uslova za inercijalni navigacioni sistem i, zavisno od analize, daje se ili komanda da se ukaže na programsku tačku na površini Zemlje ili se izda naredba za nastavak PS leta po programiranoj putanji. Programska tačka na površini Zemlje shvata se kao pseudo-svetionik, čije se koordinate formiraju na osnovu informacija iz inercijalnog navigacionog sistema.
TVRDITI
Kontrolirani padobranski sistem koji sadrži klizni padobran s teretnom platformom, serijski povezanu jedinicu za detekciju svjetionika, komandnu jedinicu čiji je drugi izlaz spojen na ulaz jedinice za detekciju svjetionika i kontrolnu jedinicu padobranske linije, karakteriziranu da dodatno sadrži serijski povezan inercijalni navigacioni sistem, čiji je drugi izlaz povezan sa drugim ulazom komandnog bloka, blok za generisanje kontrolnih signala za uključivanje/isključivanje i postavljanje početnih uslova za inercijalni navigacioni sistem, čiji je drugi izlaz povezan sa ulazom inercijalnog navigacionog sistema, treći izlaz i drugi ulaz - odnosno sa drugim ulazom i drugim izlazom blok detekcije beacon-a i dijagnostičkom jedinicom za područje Zemljine površine .Sposobnost bacanja snaga za specijalne operacije u ograničena područja je od neprocjenjive vrijednosti, posebno kada su takva područja na velikim visinama ili kada su psi napadači uključeni u operaciju.
Državne strukture se više oslanjaju na efekat povećanja snaga i sposobnosti snaga za specijalne operacije (SOF) i njihovu sposobnost da se tajno infiltriraju i napuste područja djelovanja. Neka od savremenih tehničkih sredstava koje koristi MTR različite zemlje u vazdušnom prostoru, zasnovani su na novim naprednim sistemima sposobnim da precizno isporuče grupe operatera u nepristupačna područja, uključujući visoke planinske terene sa strmim padinama.
Ovi specifični alati omogućavaju i male i velike grupe u vidu padobranskog desanta, tajno stižu u ciljana područja radi izvršavanja različitih borbenih zadataka, od osmatranja i izviđanja do direktne borbe, kao i pružanja vojne pomoći. Danas se raspon misija značajno proširio i uključuje scenarije humanitarne pomoći i operacije pomoći u katastrofama.
Da bismo odgovorili na izazove vremena, potrebno je hrabro koristiti padobrane novih modela iz savremeni materijali za prenošenje ljudi i tereta, kao i dodatnih sredstava i opreme za operacije na velikim visinama, na primjer, snabdijevanje kisikom i prijenos specijalne opreme, uključujući pse.
Ubrzo nakon što je demonstrirao svoj klizeći padobranski sistem sa samonapuhavajućom školjkom RA-1, koji se isporučuje u neotkrivenim količinama Komandi za specijalne operacije Sjedinjenih Država (USSOCOM), Airborne Systems North America je objavio da je dodao još jednog člana svojoj porodici paraglajdera.
Ovaj najnoviji sistem, označen Hi-5. razvijen je kao odgovor na moderne operativne potrebe za povećanjem dometa i nosivosti za duge i kratke padobranske skokove sa velikih visina.
Portparol kompanije je objasnio da sistem Hi-5 pruža "jedinstvene mogućnosti vojsci i da je u stanju da obezbedi ne samo superiorno dugotrajno klizanje, već vam takođe omogućava da promenite ugao klizanja za brzo spuštanje i precizno sletanje."
 Američki specijalci obučeni su u skokovima u dalj danju, uvježbavanje tajnih desanta u ciljanim područjima
Američki specijalci obučeni su u skokovima u dalj danju, uvježbavanje tajnih desanta u ciljanim područjima
Moć planiranja
Dosadašnji padobranski sistemi često su bili specijalizirana rješenja koja su se mogla koristiti za izvođenje bilo skrivenih dalekometnih sletanja sa velikih visina, ili sletanja u vodu, ili otvorenih skokova sa malih visina, pogodnijih za konvencionalne formacije ili velike padobranske sletanje specijalnih snaga.
Prema Airborne Systems North America, Hi-5 padobranski sistem ima omjer uzgona i otpora od 5,5:1 (u poređenju sa postojećim jedrilicama čiji se omjer uzgona i otpora kreće od 3:1 do 4:1) uz dodatnu mogućnost brzog prelaska na omjer uzgona i otpora od 1:1 kontroliše sistem Glide Modulation System. (Aerodinamički kvalitet - omjer podizanja i otpora)
« Za razliku od drugih metoda kontrole ugla spuštanja, kao što je korištenje trim jezičaka, Glide Modulation System ne povećava ukupnu brzinu padobrana, osiguravajući siguran prolaz na bilo kojoj visini. Ovo eliminiše potrebu za više spirala ili manevrima „zmije“ na malim visinama i omogućava vrlo precizna sletanja kroz siguran, pravi pristup.“, rekao je predstavnik kompanije.
„Padobranac ima potpunu kontrolu nad svojom pozicijom i momentom spuštanja na ciljno područje. Pored kvalitativnog prodora u tehnologiji relativnog raspona planiranja, Hi-5 sistem ima niz drugih pozitivnih kvaliteta. Za padobranca je jednostavan za održavanje i za rukovaoca padobranom, proces postavljanja je intuitivan. On premošćuje jaz između naših padobrana Intruder RA-1 i Hi-Glide, pružajući krilo visokog dizanja i otpora za precizno slijetanje i mogućnost sigurnog spuštanja u teško dostupna područja.”
 Hi-5 padobranski sistem razvijen od strane Airborne Systems North America
Hi-5 padobranski sistem razvijen od strane Airborne Systems North America
Njegov dizajn se zasniva na dodatnim kočnicama ugrađenim u prednje linije padobrana, što omogućava padobrancu da lakše mijenja aerodinamički kvalitet nadstrešnice sa 5,5:1 na 1:1 (na primjer, ako je 5,5:1, onda za svaki 100 metara gubitka visine maksimalni domet klizanja pri nultom vjetru je 550 metara). Prema navodima kompanije, padobranski sistem ima rezervnu nadstrešnicu i omogućava gotovo nečujan rad tokom tajnih operacija.
Hi-5 sistem uključuje 11-segmentnu eliptičnu nadstrešnicu koja se može postaviti na maksimalna visina 7600 metara nadmorske visine. Međutim, padobran se ne smije otvoriti niže od 1050 metara nadmorske visine. Padobran se može otvoriti Različiti putevi, u rasponu od užeta ili pilot padobrana s oprugom do sistema za ručno aktiviranje.
Međutim, od uvođenja Hi-5 sistema u oktobru 2016. godine, Airborne Systems North America razvila je padobran Hi-5 sa baldahinom. veća veličina, njegova površina je povećana sa 34 m 2 na 39 m 2 kako bi se povećala nosivost sa 220 na 250 kg.
„Ovo nam omogućava da se uklopimo u raspon težine tandemskog skoka koji nikada nismo razmatrali u prošlosti“, objasnio je glavni tehnološki direktor kompanije.
„Nadstrešnica od 39m2 nudi mogućnost klizanja kako želite ili sletanja koliko god želite, a da pritom možete nositi drugu osobu ili dodatnu opremu. Operativni zahtjevi koji se postavljaju pred moderne ratnike se šire, zahtijevajući od naših vojnika da nose više opreme, putuju na veće udaljenosti i slijeću u skučenim prostorima s preciznošću i sigurnošću. Hi-5 ispunjava sve ove zahtjeve, a kupola od 39 m2 je jedini put u budućnost."
Krajem 2016 americka vojska objavila svoju namjeru da kupi Advanced padobranski sistem RA-1 Napredni padobranski sistem Ram Air (fotografija ispod), iz kojeg padobranci kvalifikovani i za duge i za kratke skokove (sa užetom) mogu da skaču sa visine od 10.000 metara. Trebao bi zamijeniti postojeće padobranske sisteme MC-4 Ram Air Personnel Padobrane.
 Osvajanje visina
Osvajanje visina
Complete Parachute Solutions (CPS) igra značajnu ulogu na tržištu specijalnih operacija, razvijajući tehnologiju skokova sa velike visine. Prema riječima glasnogovornika CPS-a Johna Basta, njegova firma proširuje svoje mogućnosti, uključujući sponzoriranje ekspedicija na Mount Everest 2013., 2014., 2015. i 2016. godine, čija je svrha izvođenje testova na velikim visinama s ciljem testiranja novih zahtjeva modernog operativnog prostora .
Bast je objasnio da se tim CPS Everesta nedavno vratio sa Himalaja "sa novim rekordima sletanja na velikim visinama" i validacijom novog višenamjenskog taktičkog sistema kiseonika. Nakon niza skokova helikopterom, tim CPS-a je rekao da su se sa ovog putovanja vratili sa još 4 svjetska rekorda u skokovima u dalj koji se odnose na jednostavnost korištenja, veliku visinu, preciznost i kapacitet dizanja.
Početni skokovi izvedeni su iz helikoptera koji su polijetali sa aerodroma Syanbosh u Nepalu. Padobranci USSOCOM-a, konkretno Navy SEALs i Marine Corps SEALs, skakali su sa visina od oko 3.800 metara nadmorske visine, boreći se sa jakim vjetrovima, niskim temperaturama i nedostatkom kisika tokom spuštanja, gdje hipoksija postaje ozbiljan problem. U borbi protiv hipoksije, stručnjaci CPS-a oslanjali su se na novu generaciju univerzalnog sistema za disanje kiseonikom MTOS (Multi-Purpose Tactical Oxygen System) britanske kompanije Top Out Aero, koji omogućava operaterima da slobodno dišu na “ekstremnim visinama”.
Međutim, MTOS se koristio ne samo prilikom padobranskih skokova, ovaj sistem se koristio i pri izvođenju izviđačkih misija u visinskim područjima, pripremi mjesta za sletanje i drugih zadataka na velikim visinama na veoma teškom terenu.
Svjetski rekordi koje je oborio CPS uključivao je prvo sletanje na 3.800 metara u manje od 50 skokova od strane padobranca koji je bio obučen za obavljanje specijalnih misija na velikim visinama. Prema Bastu, instruktorica i bivša snajperistica marinaca Kaylee Wojcik postala je prva skakačica s najmanjim brojem skokova koja je uspješno sletjela na jakom vjetru i razrijeđenom zraku koji je tipičan na 10.000 stopa. Ovo je značajan test agresivne kontrole nadstrešnice u specijalnim misijama i programima pripreme za sletanje koje obezbeđuje CPS."
Što se tiče visinskih rekorda, CPS instruktori su izveli program skokova i doskoka na visini od 4500 metara od Ama Dalama. Tamo je rezervista marinaca kapetan Carroll uspješno završio skok sa visine sa rancem od 32 kg. Grupa se potom preselila u Gorak Šep, gde su sleteli na visinu od skoro 5.200 metara, i na planinu Kala Pathar, gde su izvodili skokove sa doskocima na visini od preko 5.300 metara.
Konačno, oboreni su i novi rekordi u tandem skokovima i doskocima na visini od 5100 metara, za šta su korišteni padobrani TP460 i Special Operation Vector 3 Tandem Sigma. Sličan koncept bi se mogao koristiti za transport neobučenog osoblja u područje operacije gdje može nastaviti svoju specijaliziranu misiju.
 Oslobađanje padobranskih desantnih grupa često je popraćeno preciznim oslobađanjem teretnih platformi koje isporučuju taktička vozila, brze čamce i drugu specijalnu opremu na zemlju
Oslobađanje padobranskih desantnih grupa često je popraćeno preciznim oslobađanjem teretnih platformi koje isporučuju taktička vozila, brze čamce i drugu specijalnu opremu na zemlju
Dostava specijalnog tereta
Pored dostave osoblja padobranom, teretom i dr specijalnim sredstvima, uključujući pse napadače, padobranci ostaju kritični element SOF-a u modernom operativnom okruženju.
NATO SOF-ovi, uključujući Veliku Britaniju i Francusku, nedavno su završili procjenu sistema za isporuku zraka dizajniranih za ispuštanje brzih čamaca na površinu mora. To uključuje MCADS (Sistem za zračnu isporuku pomorskih plovila) kompanije Airborne Systems, koji je sposoban nositi čamce do 12 metara dužine, uključujući 9,5 metara Offshore Raiding Craft brodove britanske kompanije Holyhead Marine.
Dostava brodom
Britansko ministarstvo namjerava kupiti ukupno 14 MCADS platformi za non-stop dostavu za čamce i čamce u 2017-2018. Platforme PRIBAD 21 (Platform Rigid Inflatable Boat Aerial Delivery) mogu se spustiti sa stražnje rampe vojnog transportnog aviona C-130 Hercules, A400M, C-17 i C-5. Francuske specijalne snage su takođe testirale sistem za isporuku svojih krutih čamaca na naduvavanje Zodiac Milpro Ecume.
Ova sposobnost i dalje je popularna u MTR-u mnogih zemalja, čije jedinice su sposobne da isporuče mala plovila na velike udaljenosti u svrhu infiltracije i evakuacije posebnih grupa.
Nakon što se platforma PRIBAD oslobodi iz teretnog prostora aviona, prvo se postavlja pilotski padobran za izvlačenje glavne nadstrešnice. Prateći teret, posebna grupa skače na svojim pojedinačnim padobranima, na primjer RA-1. U borbenim uslovima, kako bi se osigurala tajnost operacije nakon prskanja, paleta sistema PRIBAD može biti poplavljena, iako tokom borbene obuke palete zbog posebnih plovaka najčešće ostaju na površini za ponovnu upotrebu.
Osim toga, britansko Ministarstvo odbrane razmatra sličnu tehnologiju za sigurno slijetanje taktičkih vozila i druge opreme. Borbene jedinice su 2016. godine procijenile padobran srednjeg stresa (MSP) Airborne Systems, koji je sposoban spustiti teret težine do 3.175 kg, što mu omogućava da baci različite vozila, uključujući specijalna vozila MRZR-2 i MRZR-4 kompanije Polaris Defense.
Kao i kod platforme PRIBAD 21, pilotski padobran MSP-a primorava glavnu nadstrešnicu sa vazdušnim jastukom da se aktivira, sposobnu da bezbedno spusti taktička vozila na zemlju. Sistem MSP je projektovan za sletanje iz vojno-transportnih aviona C-130J i A400M.
Međutim, Ministarstvo odbrane već nastoji da zameni ažuriranu MSP tehnologiju ATAX sistemom za isporuku vazduha kompanije Airborne Systems, koji je u stanju da isporuči teret maksimalne težine 7260 kg. ATAX sistem je dizajniran za isporuku zemlje i offshore platforme, iako odbrambeni izvori nisu mogli potvrditi kada će doći do prelaska na nove sisteme.
Kako je objasnio Bast, CPS je razvio još jednu verziju kompletnog padobranskog sistema za autonomnu isporuku, koji je dizajniran za isporuku ultralakog tereta težine od 115 do 270 kg.
Upravljani teret
„Ovaj upravljani sistem dostave tereta takođe omogućava visoki nivo preciznost doskoka u datoj tački i po pravilu je koriste grupe koje izvode skokove u dalj kao sredstvo za povećanje efikasnosti izvođenja borbene misije. Pruža dodatne mogućnosti timovima za potragu i spašavanje da precizno isporuče neophodne medicinske potrepštine i opremu za spašavanje života”, nastavio je, ukazujući i na potrebu za sličnim vojnim specijalistima za humanitarnu pomoć i operacije pomoći u katastrofama.
“Mnogi odjeli Ministarstva obrane, u kojima rade stručnjaci za MFF (vojni slobodni pad), također imaju zadatak da odgovore na prirodne katastrofe u udaljenim područjima s vrlo ograničenim zonama slijetanja. Konstantno testirano u veoma teškim uslovima na Everestu, MS-360 padobransko krilo se pokazalo kao izuzetno efikasan „višenamenski padobran“ koji omogućava spasilačkim timovima da precizno slete u ograničenim područjima za sletanje“, objasnio je Bast. Također je napomenuo da su vatrogasni padobranski timovi američke šumske službe počeli da prelaze sa postojećih okruglih padobrana na paraglajdere CPS CR-360 kako bi preciznije dopremili osoblje u ciljana područja.
 Precizne platforme za isporuku tereta, označene infracrvenim svjetlima za pozitivnu identifikaciju u kući, približavaju se mjestu slijetanja
Precizne platforme za isporuku tereta, označene infracrvenim svjetlima za pozitivnu identifikaciju u kući, približavaju se mjestu slijetanja
Dog work
Takođe, ne treba zaboraviti ni isporuku radnih pasa (ili K-9) u područje djelovanja , koji su „vezani“ za operatere raspoređene na padobranskim sistemima poput paraglajdera. Kako je objasnio Bast, upotreba K-9 u operacijama potrage i spašavanja i borbenim operacijama eksponencijalno je porasla u posljednjih nekoliko godina, budući da se jedinice SOF-a u velikoj mjeri oslanjaju na pse za različite misije, od nadzora/izviđanja, direktnog angažmana, vojne i humanitarne pomoći , za vanredne situacije.
CPS je posebno razvio dva rješenja za međunarodnu SOF zajednicu, K-9 Jump Bag i Mannequin Solution, za podršku operacijama i scenarijima obuke, uključujući tandem skokove operater-očnjak.

Popis CPS proizvoda za skokove sa velike visine, od kojih su mnogi u službi specijalnih snaga u različitim zemljama, također uključuje elemente za ojačanje, na primjer, padobranske konopce, stezaljke i priključke za uže. Pored toga, portfelj kompanije uključuje padobrane serije MS, M1 i M2, posebno dizajnirane za „veliki broj raspoređivanja, koje karakteriše odlična stabilnost, manevarska sposobnost i povećan domet“.
“Modele MS M1/M2 trenutno koriste specijalne snage širom svijeta, pružajući mogućnost sletanja u skučenim područjima pomoću kočionih sistema različite vrste“, rekao je Bast. On je opisao MS-M4 kao sistem koji se može koristiti i za padobranstvo i za skakanje s užetom, za razliku od modela MS-M1 i MS-M2, koji su dizajnirani samo za padobranstvo.
“Padobran za duge i kratke skokove MS-360-M4 je poboljšana verzija MS-M2. Performanse klizanja su značajno poboljšane za više od 33%, što rezultira omjerom podizanja i otpora (relativna udaljenost klizanja) od 3,5:1 do 4:1 ovisno o konfiguraciji i opterećenju.”
“Naš eksperimentalni program je pokazao da je nekoliko manjih modifikacija dizajna postojećih MS padobrana, uglavnom promjena oblika nadstrešnice i kočnica, poboljšalo performanse podizanja i vučenja. MS-M4 je baziran na mješovitom dizajnu, zadržavajući poliesterske ovjesne linije, eliminirane su neželjene vibracije povezane s povlačenjem konopa, koje su mogle utjecati na kvalitetu klizanja,” objasnio je Bast.
Padobran MS-360-M4 ima površinu kupole od 33 m2, raspon krila od 9 metara i sposoban je da nosi teret do 205 kg. Sa njim možete skočiti i sa visine od 10.500 metara (standardna visina leta aviona) i (nakon manjih podešavanja) sa minimalne visine od samo 900 metara.
u međuvremenu, Ruske specijalne snage počeo da dobija specijal padobranski sistem Arbalet-2, razvijen od strane NPP Zvezda. Prema podacima Ministarstva odbrane, ruske specijalne snage iz brigada specijalnih snaga testirale su opremu u arktičkim uslovima tokom 2016. godine, izvodeći sletanja na malim visinama kako bi brzo ušli u ciljana područja.
Kako navode u kompaniji Zvezda, sa specijalnim padobranskim sistemom Arbalet-2 možete skakati i iz aviona i iz helikoptera brzinom leta do 350 km/h; uz težinu leta do 160 kg, osigurava pouzdan rad na visinama do 4000 metara.
 Specijalni padobranski sistem Arbalet-2
Specijalni padobranski sistem Arbalet-2
Sa brzinom vertikalnog spuštanja ne većom od 5 m/s i horizontalnom brzinom spuštanja ne manjom od 10,5 m/s, klizni padobran Arbalet-2 ima odličnu manevarsku sposobnost (okretanje od 360 stepeni za do 8 sekundi), uključujući stabilno spuštanje u turbulentnoj atmosferi. Padobran se također aktivira pomoću veze za ručno aktiviranje, desnom i lijevom rukom.
Kako cjelokupni operativni prostor i dalje drži snažan naglasak na korištenju SOF-a, potrebne su napredne sposobnosti za dopremanje osoblja u složena borbena područja. Padobransko slijetanje sa velikih visina ostat će glavna taktička metoda specijalnih snaga koje nastoje tajno spustiti u određena područja. Konstantno poboljšanje aerodinamičkih kvaliteta padobranskih sistema omogućit će avijaciji podrške da rasporedi grupe za sletanje sa sigurne udaljenosti i sigurne visine i minimizira rizik od vatre iz neprijateljskih protivvazdušnih sistema, posebno prenosivih protivvazdušnih raketnih sistema.