2017 m. gruodžio 29 d. agentūra "Interfax-AVN", nauja iki keturių tonų sverianti valdomo parašiuto platforma, kurią kuria nemažai Rusijos įmonės, užtikrins didelį krovinio pristatymo į nurodytą tašką tikslumą. Apie tai penktadienį buvo pranešta „Interfax-AVN“ kariniame-pramoniniame komplekse.
JAV armijos skrydžio metu JAV valdomos Jungtinės tikslios oro lašelių sistemos (JPADS) parašiutinės platformos
„Ši parašiutinė platforma turėtų būti naudojama krovinių pristatymui Oro pajėgų, taip pat kitų struktūrų interesais“, – sakė agentūros pašnekovas.
Anot jo, automatinė valdymo sistema leis parašiuto sistemą su didelis tikslumas nusileisti tam tikrame žemės paviršiaus taške mažiausiu įmanomu horizontaliu ir vertikaliu greičiu.
"Viso skrydžio metu valdymas bus vykdomas automatiniu režimu. Skrydžio metu galima keisti nusileidimo taško koordinates. Nusileidimą užtikrins platformos valdymo sistema su navigacija naudojant palydovinės navigacijos sistemų Glonass / GPS signalus tikslumu su apskritu tikėtinu 100 m nuokrypiu“, – sakė jis.agentūros pašnekovas.
Jis teigė, kad projekte dalyvauja S.V.Ilušino vardo aviacijos kompleksas, Aeroelastinių sistemų tyrimų institutas, bendrovės „Universal“ ir „Aviatrans“.
Pasak Rusijos nepilotuojamų sistemų eksperto Deniso Fedutinovo, šios užduoties aktualumą lemia būtinybė gerinti prekių pristatymo tikslumą, kurio dažnai neužtikrina turimos techninės priemonės.
"Kada sėkmingas įgyvendinimas Šis projektas galime daryti prielaidą, kad šią platformą panaudosime ne tik sprendžiant problemas, su kuriomis susiduria Rusijos ginkluotosios pajėgos apskritai ir konkrečiai Oro desanto pajėgos, bet ir kitoms struktūroms, pavyzdžiui, Nepaprastųjų situacijų ministerijai“, – sakė D. Fedutinovas.
bmpd komentaras. Tvarkomųjų temos parašiutų platformos yra plačiai išplėtota užsienyje, kur jau sukurta nemažai tokių sistemų, tarp jų ir tas, kurios rado pritaikymą Vakarų ginkluotosiose pajėgose. Visų pirma, aktyviai diegiama Kanados kompanijos MMIST valdomų parašiutų sistemų Sherpa šeima, kurią JAV jūrų pėstininkų korpusas Irake naudoja nuo 2004 m. ir kurią taip pat valdo daugelio NATO šalių ginkluotosios pajėgos. Sherpa sistema leidžia naudoti parašiutų platformas, sveriančias iki 10 tūkstančių svarų (4500 kg). „Sherpa“ taip pat gali būti naudojama su varikliu.
Nuo 2006 m. JAV kariuomenė ir oro pajėgos eksploatuoja bendrai sukurtą jungtinę tikslią oro lašelių sistemą (JPADS), kurią masiškai gamina Airborne Systems North America (Britanijos bendrovės Airborne Systems filialas Amerikoje) ir kurios variantai leidžia naudoti parašiutų platformos, sveriančios iki 40 tūkst. svarų (18 tonų) (nors iš tikrųjų JAV oro pajėgos perka sistemas, kurių apkrova iki 10 tūkst. svarų – 4500 kg). Pranešama, kad lengvųjų JPADS platformų variantų krovinio pristatymo „slenkstinis“ tikslumas yra 150 m, o 10 tūkstančių svarų sveriančios platformos – 250 m. iki 2000 svarų (900 kg).
Nuo 2016 m. JAV kariuomenė išbando JPADS valdomų parašiutų platformų su optinės koreliacijos nukreipimo sistema, o ne palydovine sistema, kurios turėtų pašalinti priešo trukdžius GPS imtuvams ir padidinti pristatymo tikslumą.
ZVO Nr.5/2007, p. 46-51
AMERIKIETiška parašiuto SISTEMA "ONYX"
Kapitonas 2 laipsnis S. PROKOFIEV
Vienas iš karybos bruožų šiuolaikinėmis sąlygomis, aiškiai parodytas karinėse operacijose Afganistane ir Irake, buvo plačiai paplitęs specialiųjų pajėgų vienetų (SPN) naudojimas visuose konfliktų atsiradimo ir vystymosi etapuose. Vienas iš pagrindinių būdų išvesti specialiųjų pajėgų dalinius į kovinių misijų zoną buvo ir išlieka nusileidimas parašiutu. Ateityje bus organizuojamas reikalingų krovinių pristatymas jiems oro transportu, naudojant parašiutines krovinių sistemas (PGS).
Šis straipsnis pradeda publikacijų seriją, apimančią parašiutų sistemų ir pajėgų nusileidimo įrangos kūrimą specialios operacijos NATO šalys.
Vykdydama karo veiksmus Afganistane ir Irake 2001 m. spalio – 2004 m. liepos mėn., JAV sausumos pajėgų vadovybė 27 kartus naudojo įvairias desantines pajėgas ir dieną, ir naktį. Iš jų septyni yra parašiutiniai, įskaitant vieną su nusileidimu iš didelio aukščio ir ilgą atidėjimą atidarant parašiutą, likusieji - iš sraigtasparnių nusileidimo būdu. Jie buvo pagrįsti divizijomis ir daliniais oro desanto kariai ir specialiųjų operacijų pajėgos. Be to, nusileidimus, įskaitant parašiutus, naudojo jūrų pėstininkų korpuso komandos ir JAV karinio jūrų laivyno specialiosios operacijos.
Pavyzdžiui, 2004 m. birželio mėn. JAV jūrų pėstininkų korpuso naktiniai desantininkai nusileido Irake, norėdami surengti pasalą tikėtino vilkstinės su ginklais ir amunicija pasipriešinimo pajėgoms keliais. Pirmiausia iš daugiau nei 3000 m aukščio ir kelių kilometrų atstumu nuo nusileidimo vietos iš lėktuvo KS-130 buvo išmesta žvalgybos grupė. Išmetimas buvo atliktas naudojant valdomos sklandymo parašiutų sistemos (UPPS) nedelsiant atidarius parašiutus. Nusileidę žvalgai apžiūrėjo nusileidimo vietą, perimetru įrengė stebėjimo postus ir įrengė radijo švyturius, kad būtų užtikrintas tikslingas desantininkų numetimas. Didžiąją nusileidimo dalį (apie 60 žmonių) iš maždaug 300 m aukščio išmetė du sraigtasparniai CH-46E.
Dabartiniuose JAV ginkluotųjų pajėgų vadovybės planuose numatyta didinti specialiųjų operacijų pajėgų (SOF) skaičių. Planuojama suformuoti vieną papildomą batalioną į sausumos pajėgų specialiųjų pajėgų (oro desantininkų) grupes, o Karinių jūrų pajėgų specialiosiose pajėgose – po vieną papildomą specialiųjų pajėgų žvalgybos narų būrį. Iki 2006 m. spalio pradžios buvo baigta formuoti JAV jūrų pėstininkų korpuso specialiųjų operacijų vadovybę, kurią sudarė du specialiųjų pajėgų batalionai ir paramos padaliniai. bendra jėga 2500 žmonių. Visi šių padalinių kariškiai privalo atlikti šuolius parašiutu. Panašią organizacinę ir personalo veiklą, nors ir mažesniu mastu, vykdo JAV sąjungininkės NATO, pirmiausia Didžioji Britanija, Prancūzija, Vokietija, Nyderlandai ir Norvegija.
Užsienio ekspertai pastebi, kad per pastaruosius dešimtmečius pasikeitė požiūris į desantininkų nusileidimo būdus. Visų pirma, padaugėjo MTR karių, kuriems pagrindinėmis oro desantinėmis priemonėmis pasitraukti į užduočių zoną tapo NANO (High Altitude High Opening – „nusileidimas iš didelio aukščio nedelsiant atidarant parašiutą“) ir HALO nusileidimo metodai. (High Altitude Low Opening - „nusileidimas iš didelio aukščio, ilgai delsiant atidaryti parašiutą“).
Pavyzdžiui, dešimtojo dešimtmečio pabaigoje kiekviename JAV armijos specialiųjų pajėgų batalione buvo tik vienas reguliarus operatyvinis būrys „Alfa“ (12 žmonių), o karinio jūrų laivyno specialiųjų pajėgų būryje – vienas būrys (16 žmonių), kurio personalas buvo specialiai apmokytas. UPPS buvo tiekiamas ir buvo pasirengęs atlikti kovines misijas naudodamas aukščiau nurodytus nusileidimo būdus.
Šiuo metu specialiųjų pajėgų batalione yra trys etatiniai Alfa būriai (po vieną kuopą) ir du būriai Karinių jūrų pajėgų specialiųjų pajėgų būryje yra pasirengę nusileisti šiais būdais. Naujai suformuotuose Jūrų pėstininkų specialiųjų pajėgų batalionuose buvo buvusios MP divizijos giluminės žvalgybos kuopos (kiekvienoje apie 100 žmonių), kurių personalas yra pilnai parengtas šuoliams aukštyje parašiutu.
Užsienio ekspertų teigimu, šių nusileidimo būdų naudojimas padidina specialiųjų pajėgų padalinių veiksmų slaptumą, nes neleidžia priešui patikimai tiksliai nustatyti nusileidimo vietų ir net aptikti paties nusileidimo fakto. Be to, atsižvelgiant į dabartinę priemonių raidą oro gynyba, šis metodas sumažina karinių transporto orlaivių nuostolių dėl antžeminių oro gynybos sistemų gaisro tikimybę, nes leidžia nusileisti iš didelio aukščio, orlaiviams nepatenkant į priešo antžeminių oro gynybos sistemų veikimo zoną.
JAV karinio jūrų laivyno MTR vadovybė planuoja, kad kiekvienas žvalgybininkas naras, taip pat RJB-11 tipo katerių, galinčių nutūpti ant vandens, įgulos narys, UPPS pagalba mokytųsi tūpti. Pastariesiems tai reiškia, kad jie gali apsitaškyti arti valties ir po to greitai prie jos prieiti. Tuo tikslu Karinių jūrų pajėgų specialiųjų pajėgų mokymo centre Koronado karinio jūrų laivyno bazėje buvo organizuojami nuolatiniai šokinėjimo su parašiutu aukšto aukštyje kursai, kadangi karinio jūrų laivyno MTR kasmet skiriamų vietų Yuma tarprūšiniame šuolių į aukštį mokymo centre neužtenka treniruotėms. reikiamo šių junginių karinio personalo skaičiaus. Įdomus faktas, kad mokymus šiame centre vykdo „GPS World“ kompanijos specialistai, su kuriais Karinių jūrų pajėgų MTR vadovybė sudarė atitinkamą sutartį, patvirtindama programą ir mokymo metodiką. Be to, ši įmonė pagal kitą sutartį su ta pačia komanda gamina ir jai tiekia įvairių tipų HIPS.
Kita pastaraisiais dešimtmečiais išryškėjusi tendencija – specialiųjų pajėgų karinių vienetų skrydžio svorio padidėjimas leidžiantis parašiutu, kurį nulemia bendras paties parašiutininko, jo ginklų ir technikos svoris, nusileidžiant kartu su juo. taip pat savo UPSS svorį. Pavyzdžiui, net operacijos „Dykumos audra“ metu MTR ginklų ir įrangos masė kai kuriais atvejais siekė 90 kg.
Šiuo metu, remiantis įgyta patirtimi ir naujais laukiančiais iššūkiais, visų pirma JAV ir kai kuriose Vakarų Europos šalyse, kuriamos parašiutų sistemos ir pagalbinės tūpimo priemonės (PS ir SD), taip pat dirbama siekiant pagerinti numetimo tikslumą. žmonių ir krovinių specialiųjų pajėgų interesais, aktyviai plėtojama.operacijos. Pavyzdžiui, viena iš NATO gairių (DAT-5-Ref.: AC/259-D(2004)0023 Final) apibrėžia 10 svarbiausių ginklų ir ginklų kūrimo sričių. karinė įranga kovoti tarptautinis terorizmas. Vienas iš jų (5 punktas) yra: „Didelio tikslumo PS ir SD kūrimas MTR“. Šių sričių MTEP finansavimas taip pat didėja. Pavyzdžiui, JAV Gynybos departamentas 2005 metais šiems tikslams skyrė 25 milijonus dolerių, tai yra beveik 7 kartus daugiau nei 1996 metais.
Tuo pačiu metu, pasak užsienio ekspertų, plėtra valdė sklandymo parašiutu krovinių sistemos(UPPGS) yra perspektyviausia SD plėtros kryptis. Jų pagalba galima tiksliai ir slaptai pristatyti prekes specialiųjų pajėgų daliniams, veikiantiems priešo užimtose teritorijose. Šios sistemos taip pat gali būti naudojamos teikiant navigacinę pagalbą specialiųjų pajėgų grupėms (UPGS veikia kaip „vadovas“ arba „vadovas“ žvalgybos grupėms, kurios nusileidžia po jo ant UPPS, arba su jo pagalba nustatomi apšvietimo švyturiai, rodantys nusileidimo vietas arba krovinio priėmimas naktį). Be to, jie gali būti naudojami atliekant psichologines operacijas (barstyti propagandinius lankstinukus ir kitą kampanijos medžiagą griežtai apibrėžtose vietose). Tokios lėšos gali būti paklausios ne tik karinėje srityje, bet ir civiliniame sektoriuje, pavyzdžiui, teikiant pagalbą nukentėjusiems nuo stichinių nelaimių ar žmogaus sukeltų nelaimių, dirbantiems sunkiai pasiekiamuose kalnuotuose ar šiauriniuose regionuose, kai nėra kito būdo greitai ir tiksliai pristatyti jiems reikalingas prekes arba pristatymas ne oro transportu užtruks ilgai.
UPPGS kombinuotas tipas"Oniksas" sukūrė „Atair Aerospace“ (Niujorkas), kaip „Natik“ tyrimų centro ir JAV ginkluotųjų pajėgų specialiųjų operacijų vadovybės mažoms įmonėms skirtos mokslinių tyrimų ir plėtros finansavimo programos dalį. 2005 m. spalio mėn. buvo atlikta daugiau nei 200 UPGS skrydžio bandymų.
Onyx sistema skirta leisti krovinius, kurių skrydžio svoris yra iki 1000 kg iš aukščio iki 10700 m virš jūros lygio iš lėktuvų ir sraigtasparnių su sumontuota ritinine konvejerio įranga, naudojant savaiminio kritimo metodą (kai orlaivis turi teigiamą ataka ir krovinys yra atskirtas gravitacijos), kai orlaivio greitis iki 278 km/h iki 44 km atstumu nuo nurodyto nusileidimo taško NANO arba HALO metodu naudojant parašiutą. Vidutinė kvadratinė tūpimo paklaida nuo nurodyto taško neviršija 50 m.
Išskirtinis UPGS „Onyx“ bruožas yra dviejų parašiutų sistemų, veikiančių nuosekliai skirtingais apkrovos nuleidimo etapais, naudojimas: valdoma sklandymo parašiuto sistema su greitaeigiu elipsiniu kupolu plane ir nevaldoma parašiutų nusileidimo sistema su apvaliu krovininiu kupolu, skirtu saugiam parašiutu nušautam objektui nusileisti.
Įmonė sukūrė trijų tipų UPPGS: „Onyx 500“ (skrydžio svoris 34-227 kg), „Onyx 2200“ (227-1000 kg) ir „Micro Onyx“, skirtą nedidelių gabaritų kroviniams, sveriantiems iki 9 kg, nutupdyti.
Kupolo UPGS "Onyx 500" dviejų korpusų. Kupolo stabdymo plotas 11,15 m2, tarpatramis 3,65 m. Sulenktos parašiuto sistemos ir parašiuto valdymo bloko (PCU) svoris 16,34 kg. UPGS „Onyx 2200“ dviejų korpusų kupolo plotas – 32,5 m2, tarpatramis – 11,58 m. Nusileidimo sistemos kupolo plotas – 204,3 m2 (įrengtas Sombrero gofravimo įtaisas tipas, gamintojas Butler). Parašiuto sistemos su BUP masė yra 45 kg. Abiejų UPGS aerodinaminė kokybė yra 4,5.
Parašiuto sistema įjungiama iš troso, skirto priverstiniam orlaivio parašiuto atidarymui. Sklandymo sistema dislokuojama pagal kaskadinę schemą: pirmiausia išskleistas stabilizuojantis parašiutas, užtikrinantis, kad krovinys būtų nuleistas į iš anksto nustatytą aukštį arba per iš anksto nustatytą laiką, o po to, suveikiant automatiniam parašiutui, įjungiamas pagrindinis parašiutas. sistema pradedama eksploatuoti. Onyx sistemos parašiutinė mašina pagaminta standartinio elektroninio pirotechnikos saugos parašiutinio įtaiso pagrindu. Užpildžius pagrindinio parašiuto stogelį, stabilizuojantis parašiutas yra virš pagrindinio parašiuto stogelio ir už jo ir netrukdo jo valdyti nusileidimo metu.
Gofravimo įtaisas, skirtas sumažinti dinamines apkrovas atidarant pagrindinį planavimo sistemos kupolą, užtikrina laipsnišką kupolo sekcijų užpildymą: pirmiausia centrinės, tada šoninės. Valdymo blokas užtikrina automatinį Oniks UPGS ištraukimą į nusileidimo sistemos atidarymo tašką pagal nurodytą nusileidimo trajektoriją (galima naudoti kelis maršruto posūkius, leistis stačia spirale). Po paleidimo UPGS pasuka į taikinį ir, planuodamas, artėja prie jo, palaipsniui nusileisdamas į nusileidimo pradžios tašką, esantį virš nurodyto nusileidimo taško 1370 m aukštyje virš reljefo. Tada UPGS pradeda leistis stačia spirale, apibūdinančią 80 m skersmens spiralę, kuri susiaurėja artėjant prie žemės. Vidutinis horizontalaus sklandymo greitis – 41 m/s, vertikalus greitis leidžiantis spirale – 62 m/s. 125–175 m aukštyje virš reljefo virš nurodyto nusileidimo taško tūpimo sistema dislokuojama naudojant bandomąjį lataką, o krovinys nusileidžia ant apvalaus kupolo. Nusileidimo sistemos aktyvavimo tašką apskaičiuoja borto skaitmeninis kompiuteris BUP realiu laiku, atsižvelgdamas į vėjo dreifą. BUP, parašiuto mašina, taip pat sklandymo parašiutų sistemos (PPS) kupolai lieka nusileidimo stadijoje ant jungiamosios jungties ir gali būti naudojami pakartotiniam naudojimui.
UPGS "Onyx 2200" kupolų pakabinimas prie krovinio
Kupolas PPS sistema „Oniksas“ pagaminta iš kompozicinės medžiagos Su nulinis oro pralaidumas, sukurtas Atair Aerospace. Tai trijų sluoksnių medžiaga. Gamybos metu didelio modulio armuoto audinio sluoksnis padengiamas plona polimerine plėvele, impregnuojamas ir apdorojamas karštu slėgiu. Kadangi kompozitinis audinys nėra gaminamas tradiciniu audimo metodu, jis nėra deformuojamas, banguojamas, neaustai ir gali būti gamybos procese bet kokiu kampu ir iš pradžių įgauti reikiamas geometrines formas. Sudėtinės juostos gali būti susiuvamos, suvirinamos ultragarsu arba chemiškai surišamos klijais.
Naujoji medžiaga yra plonesnė, 3 kartus tvirtesnė, 6 kartus mažiau tempianti ir 68 procentais patvaresnė. lengvesnės nei tradicinės dvigubo rėmo, nulinio oro pralaidumo nailono medžiagos, naudojamos šiandieninio valdomo PPS stogams gaminti. Parašiuto stogelio, pagaminto iš kompozicinės medžiagos iš Atair Aerospace, priekinis pasipriešinimas yra daug mažesnis. Tokios medžiagos naudojimas leido Onyx sistemų kūrėjams sumažinti PPS kupolo plotą ir, atitinkamai, žymiai padidinti jo apkrovą. Tuo pačiu metu 65 proc padidinta aerodinaminė kokybė. Ant parašiuto, pagaminto iš kompozicinės medžiagos, baldakimo, kaip ant įprastų stogelių, nėra prisiūtas sutvirtinantis rėmas, pagamintas iš itin stiprios juostos. Jis yra mažesnio tūrio, palyginti su to paties ploto kupolu, pagamintu iš tradicinių medžiagų, tokių kaip F-111 arba ZP. Taip pat pagerėjo kupolo eksploatacinės savybės. Jis nesugeria drėgmės, nėra veikiamas ultravioletinių ir saulės radiacija, nekepa ir sulankstytas gali būti laikomas ilgiau nei penkerius metus paruoštas naudoti.
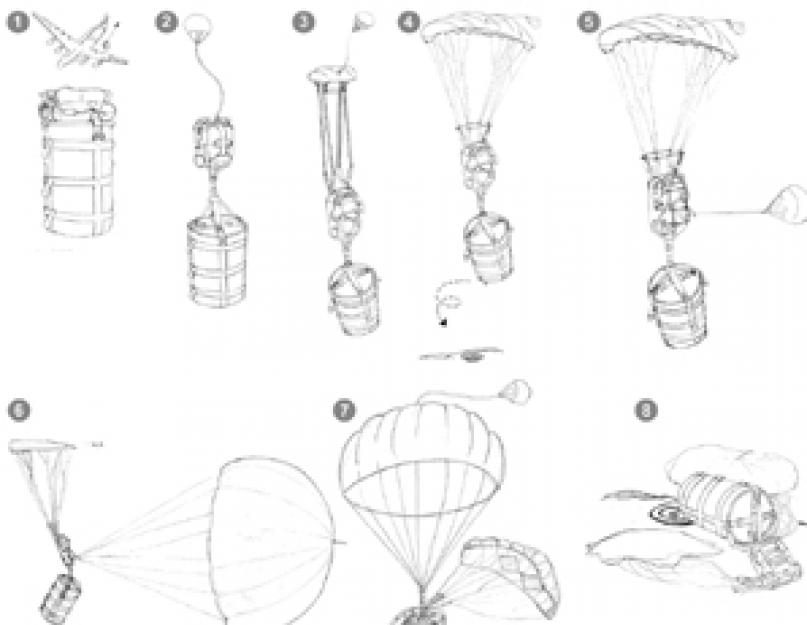
UPGS "Onyx" nusileidimas:
1 - UPGS atskyrimas nuo orlaivio, stabilizuojančio parašiuto įvedimas;
2 - nusileidimas stabilizuojančiu parašiutu; 3 - UPPGS pagrindinio kupolo atidarymas;
4 - nusileidimas ant pagrindinio kupolo; 5 ir 6 - nusileidimo parašiuto sistemos krovininio kupolo atidarymas; 7- nusileidimas krovininiu parašiutu; 8- nusileidimas
2005 m. įmonė investavo 2,5 mln. USD nuosavų lėšų, kad pastatytų įrenginį naujai parašiutinei kompozicinei medžiagai gaminti. Tačiau pagrindinis trūkumas užkerta kelią plačiai paplitęsšios medžiagos, skirtos įvairioms parašiutų sistemoms gaminti, yra jos kaina: ji yra 5 kartus brangesnė nei standartinės medžiagos.
Skrydžio valdymo blokas UPGS„Oniksas“ apima: borto kompiuterį su 32 bitų procesoriumi; „Strapdown“ inercinė navigacijos sistema (SINS), pataisyta kosminiais radijo signalais Navigacijos sistema(KRNS) NAVSTAR ir pneumatinė galios pavara PPS valdymo linijoms. Borto kompiuteris apdoroja šiuos duomenis: horizontalus diapazonas iki nusileidimo taško; barometro aukštis; ASG kursas; aukštis, apskaičiuotas naudojant CRNS; vėjo greitis; skendimo greitis; važiavimo greitis; kelio linija; peršokti / peršokti į taikinį; pasviręs diapazonas iki nusileidimo taško; numatomas nusileidimo laikas. SINS apima: trijų koordinačių giroskopą, akselerometrą, magnetometrą ir barometrinį aukščiamatį. 16 kanalų CRNS imtuvas atnaujina duomenis 4 Hz dažniu ir nustato judančio objekto koordinates 2 m tikslumu SINS matmenys 3,81 x 5,08 x 1,9 cm, svoris 42,5 g .6 x 12,7 x 5 cm kartu su BINS. Valdymo blokas išlieka veikiantis temperatūros diapazone nuo -50 iki +85°C ir aukštyje iki 17 670 m. Maitinimas tiekiamas iš 12 V ličio jonų akumuliatoriaus, kurio nepertraukiamo veikimo laikas – 6 val.
UPGS skrydžio užduotis kuriama naudojant bendrovės specialistų sukurtą skrydžio užduočių planavimo sistemą (SPPS), suderinamą su vieningu SPPS. Tai leidžia belaidžiu būdu įvesti skrydžio užduotį į bet kokio tipo UPGS valdymo bloką prieš pakraunant į orlaivį arba patekti į jį naudojant aviacijos elektroniką ore. Skrydžio užduotį galima įrašyti į išimamą duomenų laikmeną. SPPS pagalba galima atlikti visų UPGS dalių ir mechanizmų veikimo analizę po skrydžio.
Valdymo blokas leidžia naudoti UPGS „Oniks“ nenaudojant SPPS numetant krovinius iš vidutinio aukščio ir nedidelio atstumo iki nusileidimo taško. Iš anksto nustatyta tik krovinio masė ir tūpimo taško koordinatės. Išmetus UPGS iš orlaivio, PCU skrydžio metu apdoroja gautus duomenis realiu laiku ir nukreipia šią sistemą į nurodytą nusileidimo tašką. Visų pirma, 2004 m. birželio mėn. JAV kariuomenės atstovų Natik bandymų poligone buvo atlikti parodomieji UPGS išmetimai nenaudojant SPPS. Iš viso 10 kritimų buvo atlikta iš 3000 m aukščio virš reljefo ir 1,8–5,5 km atstumu nuo nurodytos tūpimo vietos. Išmetimo pradžios taškas buvo pasirinktas savavališkai. Vidutinė kvadratinė paklaida tūpimo metu buvo 57 m (didžiausias nuokrypis nuo nurodyto tūpimo taško – 84 m, minimalus – 7 m).
2004 m. gruodį Eloy, Arizona, dirigavo skrydžio bandymai adaptyvi sistema tarpparašiutinė navigacija (SMpN) serijinio UPGS „Onyx“ išleidimo metu siekiant sukurti SMPN informacinius ir valdymo algoritmus UPGS grupės skrydžiui valdyti jungtinio posūkio horizontalioje ir vertikalioje plokštumoje režimais bei UPGS konvergencijos ore prevencijos sistemą. Penki UPGS po paleidimo atliko skrydį į nurodytą tūpimo tašką kaip uždaros grupės ar junginio dalis (guolis, vieno PGS srautas). Norint nustatyti UPGS santykinę padėtį, greičius ir pagreičius ore formavimo skrydžio metu, kiekviename iš jų buvo sumontuota radijo įranga duomenims priimti ir perduoti (RlPD). Informacija buvo perduodama linija „lenta-lenta“. Tai užtikrino grupinį UPGS skrydį iki taško, kur grupė pradėjo išsiskirstyti ir manevruoti (atsidaryti), kad būtų nustatytas saugus intervalas prieš atidarant nusileidimo PS. Šių bandymų metu buvo sukurti trys UPGS grupės skrydžio valdymo metodai.
Pirmas būdas yra naudoti vieną iš sistemų kaip pirmaujančią („lyderį“). Tuo pačiu metu jis laikėsi nominalios trajektorijos, o informacija buvo generuojama vergų sistemų borto kompiuteryje, atsižvelgiant į pirmaujančios sistemos santykinius pagreičius, trajektorijos kampą ir kampinius greičius, perduodamus per radarą, ir visi likusieji sekė „vadu“. Tačiau šis būdas, anot „Atair Aerospace“ specialistų, turi didelį trūkumą: sugedus pirmaujančiam UPGS arba trumpam sugedus jo valdymo blokui, gali būti prarasta visų sistemų kontrolė.
Antras būdas apima „virtualaus lyderio“ naudojimą, kai ta pati programa buvo įvesta į visų UPPGS valdymo bloką ir jie vykdė skrydį, nuolat stebėdami savo padėtį vienas kito atžvilgiu, laikydamiesi nurodyto intervalo ir atstumo. Keičiant informaciją tarp UPGS, jų valdymo sistemos sukūrė skrydžio trajektoriją, kuri labiausiai atitiko duotąją, ir jos laikėsi. Taikant šį metodą, paskirto „vado“ tarsi nėra. Šio metodo pranašumas, pasak amerikiečių ekspertų, yra kiekvieno UPPGS PCU veikimo nepriklausomumas. Vieno ar kelių nukrypimas nuo užprogramuotos trajektorijos neturi įtakos likusių grupėje sistemų skrydžiui. Tuo pačiu metu šis SMpN veikimo būdas reikalauja gerai veikiančio ir patikimo RLPD, didelės spartos procesoriaus ir komplekso programinė įranga.
Trečias būdas decentralizuotas, yra toks. Ta pati skrydžio programa įvedama į kiekvienos UPGS PCU, tačiau informacija keičiamasi tik su dviem ar trimis artimiausiomis grupės sistemomis, iš kurių viena savo ruožtu ja keičiasi su kitos mini grupės UPGS. . Šis valdymo būdas leidžia SMPN sėkmingai atlikti UPGS grupės manevravimą: uždarymą, atidarymą, atstatymą, kad būtų galima skristi aplink kliūtis, nukrypti į skirtingas tūpimo vietas arba išformuoti grupę prieš nusileidžiant ant vienos iš jų ir, užsienio ekspertų teigimu, yra perspektyviausias.
Pasak „Atair Aerospace“ specialistų, jų sukurtas SMPN leidžia skraidyti ir saugiai nusileisti 5-50 Onyx sistemų grupei didesniu nei 55 km atstumu vienoje ar keliose atskirose tūpimo aikštelėse.
2005 m. JAV specialiųjų operacijų vadovybė įsigijo penkis Onyx 500 UPGS bandomajam eksploatavimui, o 2006 m. rugsėjį buvo pasirašyta 3,2 mln. USD vertės sutartis dėl 32 įvairių tipų sistemų pirkimo.
Pažymėtina, kad dviejų nuosekliai veikiančių pastočių naudojimas Onyx turi daug pranašumų, palyginti su vieno kupolo pastotėmis. PPS naudojimas nusileidimui leido kūrėjams sutelkti dėmesį į jo stogelio greičio gerinimą. Be to, nereikėjo sudėtingų valdymo algoritmų saugiam krovinių nusileidimui į PTS, todėl programinė įranga buvo supaprastinta ir sumažėjo jos kaina. Dideli horizontalūs ir vertikalūs greičiai sumažino UPGS laiką ore 10 kartų, lyginant su parašiutų sistemomis su apvaliu stogeliu arba UPGS, kurių kupolas pagamintas iš tradicinių medžiagų, nukritus iš to paties aukščio, taigi ir tikimybė. kai priešas juos aptiko ore. Tuo pačiu metu šios sistemos PPS skrydžio charakteristikos, kurios yra 2–3 kartus didesnės nei tūpimo PPS skrydžio taktinės charakteristikos, kurios naudojamos kartu su MTR, neleidžia jos naudoti tūpimui. . personalas specialiųjų pajėgų padalinių „vadu“.
Remiantis JAV karinėmis gairėmis, NANO ir HALO nusileidimo metodai reiškia, kad atsiskyrimas nuo orlaivio vyksta mažiausiai 18 000 pėdų (5 486 m) aukštyje virš jūros lygio. HALO parašiutas išsiskleidžia mažiausiai 3500 pėdų (1066 m) virš žemės lygio. NANO metodu parašiuto atidarymo delsa neturėtų viršyti 12 s.
Norėdami komentuoti, turite užsiregistruoti svetainėje.
Kujanovas A. Yu.
Valdoma planavimo krovinių sistema (UPGS) "Oniksas"
UPGS "Oniksas" (1 pav.), skirtas kroviniams, sveriantiems nuo 34 iki 1000 kg iš aukščio iki 10,7 km, į ribotas vietoves, naktį ir esant prastam matomumui, visiškai autonominiu režimu.
1 paveikslas -UPGS "Oniksas"
UPGS „Onyx“ veikimo principas parodytas 2 paveiksle, kur skaičiais pažymėti šie žingsniai:
1. Atskyrimas nuo LA.
2. Stabilizuojančio parašiuto įvedimas.
3. Pagrindinio sklandymo parašiuto įvedimas.
4. Borto kompiuteris „Onyx“ nukreipia UPGS į nurodytą nusileidimo tašką.
5. Nusileidimo parašiuto įvedimas į minimalų saugų aukštį.
6. Trumpalaikis nusileidimas dviem parašiutais.
7. Nusileidimas nusileidimo parašiutu.
8. Minkštas ir tikslus nusileidimas.

2 paveikslas– UPGS "Onyx" veikimo principas
UPGS "Onyx" privalumai ir veikimo duomenys:
- suteikia krovinių iškrovimą nuo 34 iki 1000 kg ;
- didelis tūpimo tikslumas - vidutinis tikslumas 75 m ;
– darbinės temperatūros diapazonas nuo -50 iki + 85C ;
- aerodinaminė kokybė - 4,5;
- modulinis sistemos dizainas užtikrina naudojimo patogumą;
- sprendimas naudoti dvi parašiutų sistemas leidžia 10 kartų sutrumpinti nusileidimo laiką lyginant su vieno kupolo ašiesimetrine parašiuto sistema;
- stabilizuojančio parašiuto naudojimas leidžia sumažinti dinamines apkrovas tuo metu, kai pradedamas sklandyti parašiutas;
- galimybė pakartotinai naudoti planavimo ir tūpimo parašiutus;
– prie GPS prijungtas mažas kompiuteris, galintis įrašyti skrydžio duomenis;
– patikimos pneumatinės valdymo pavaros;
– nusileidimo parašiutas įvedamas minimaliame leistiname aukštyje;
- susidūrimų ore išvengimo sistema;
- bazinis kompiuteris leidžia per ryšio liniją realiu laiku atlikti skrydžio maršruto koregavimus;
- skrydžio maršruto koregavimas, atsižvelgiant į vėjo stiprumo ir krypties pokyčius (šie duomenys įvedami prieš nusileidimą);
- programinė įranga pakoreguoja reikiamą sparno apkrovą, priklausomai nuo besileidžiančio krovinio masės ir pašalina sparno asimetriją skrydžio metu.
Onyx UPGS kūrėjai pastebi, kad dviejų nuosekliai veikiančių parašiutų sistemų naudojimas suteikia nemažai privalumų, lyginant su vieno kupolo sistemomis. Nusileidimo parašiuto sistemos naudojimas nusileidimui leido kūrėjams sutelkti dėmesį į baldakimo greičio gerinimą. Be to, buvo pašalintas sudėtingų valdymo algoritmų poreikis saugiam krovinio nusileidimui ant nusileidimo parašiuto sistemos, todėl buvo supaprastinta programinė įranga ir sumažėjo jos sąnaudos. Didelis horizontalus ir vertikalus greitis sumažino UPGS buvimo ore laiką 10 kartų, lyginant su parašiutų sistemomis su ašies simetrišku stogeliu, taip sumažinant tikimybę, kad priešas aptiks UPGS ore. Tuo pačiu metu šios sistemos UPGS skrydžio charakteristikos yra 2–3 kartus didesnės nei „sparno“ tipo amfibinių parašiutų sistemų, kurios yra naudojamos specialiųjų operacijų pajėgose, skrydžio charakteristikos. neleisti jo naudoti. kaip "vadovas" specialiųjų pajėgų padalinių personalo desantavimo metu.
Ir vis dėlto apvalaus nusileidimo parašiuto naudojimas sumažina patikimumo ir be gedimų veikimo rodiklius, padidina svorio ir dydžio rodiklius, apsunkina viso Onyx UPGS veikimą.
Galbūt šį sprendimą pirmiausia nulėmė Onyx UPGS kūrėjų negalėjimas (sunkumas) įgyvendinti dinaminį stabdymą ar aerodinaminę detonaciją.
Šiuo metu yra sukurta UPGS, kurioje DT principas yra įgyvendintas tam, kad būtų pasiektas tam tikras PS nusileidimo greitis.
Literatūra
1 http://www.extremfly.com.
2 S. Prokofjevas „Amerikietiška parašiutų sistema „Oniksas“ – užsien karinė apžvalga №5 2007.
Sistema užtikrina įrangos grąžinimą į nurodytą tašką ir pašalina tiesioginį žmogaus dalyvavimą diagnozuojant žmonėms pavojingas vietas. Sistema gali būti naudojama įvairiuose oro sąlygos ir įvairiu paros metu, pakartotinai. Sistemą sudaro sklandantis parašiutas su krovinio platforma, švyturių aptikimo blokas, komandų blokas, parašiutų linijų valdymo blokas, inercinė navigacijos sistema, valdymo signalų generavimo įrenginys įjungimui (išjungimui) ir nustatymui. pradines sąlygas inercinei navigacijos sistemai ir Žemės paviršiaus ploto diagnozavimo blokui. 9 serga.
Išradimas yra susijęs su aviacijos technologijomis, ypač su valdomomis parašiutų sistemomis, kurios gali būti naudojamos įvairiems tikslams: prekių pristatymui į sunkiai pasiekiamas vietas, stichinių nelaimių, avarijų vietas, diagnostikai ir žvalgybai. įvairūs rajonai ir tt Daugėjant ekologinių nelaimių, tokių kaip Černobylio avarija, miškų ir laukų, tundros ir taigos užterštumas karinės veiklos atliekomis ir nafta, iškyla tikslios diagnostikos ir įvairių vietovių tyrinėjimo uždavinys. žemės paviršiaus be žmogaus įsikišimo dėl neprieinamumo ir (arba) žalingo poveikio. Žinomos matavimo ir diagnostikos įrangos pristatymo sraigtasparniais priemonės, kurių trūkumas – galimybė žmogų patekti į pavojingas sąlygas (radioaktyvioji spinduliuotė ir kt.). Žinomos priemonės, skirtos įrangos pristatymui naudojant zondus ir raketas, tokių sistemų trūkumas yra telemetrijos ar grąžinimo vienetų poreikis, kurį sunku padaryti sunkiai pasiekiamose vietose. Šias užduotis galima išspręsti naudojant valdomą parašiuto sistemą. Žinoma sklandymo parašiuto sistema naudingajam kroviniui gabenti (JAV patentas N 4865274, klasė B 64 D 17/34, Appl. 29.04.88 - prototipas), kurioje yra sparno formos parašiutas, valdymo blokas parašiutų linijoms keisti sparno būsena ir skrydžio trajektorija . Ši konstrukcija neužtikrina tikslaus krovinio pristatymo. Yra žinoma valdoma parašiutų sistema, skirta įvairių krovinių pristatymui į sunkiai pasiekiamas stichinių nelaimių, avarijų ir pan. vietas (RF patentas N 2039680, klasė B 64 D 17/34, gruodis 08.06.93), kurioje yra sklandymas parašiutas, pakabos sistema, krovinių platforma ir parašiutų linijos valdymo konteineris. Valdymas vykdomas komandų bloku pagal nurodytą veiklos programą, sukuriant valdymo perkrovas, sugriežtinant linijas, remiantis informacijos apie krovinio nutūpimo vietoje esantį švyturį analize. Informacijos analizę atlieka krovinių platformoje esantis švyturių aptikimo blokas, prijungtas prie komandų bloko, kurio vienas išėjimas yra prijungtas prie parašiutų linijų valdymo bloko, o kitas - grįžtamuoju ryšiu į švyturių aptikimo bloką. Priklausomai nuo to, ar nusileidimo vietoje yra vieno ar kito tipo švyturys, platformoje yra sumontuotas atitinkamo tipo jutiklis, pagamintas modulinėje versijoje. Gali būti naudojami švyturių jutikliai, pagrįsti skirtingais fiziniais principais arba veikiantys šiluminiu kontrastu, arba kombinuoti. Švyturių aptikimas gali būti atliekamas naudojant pasyvias aptikimo priemones, aktyvias (naudojant signalų skleidimo ir priėmimo sistemas) arba pusiau aktyvias priemones (su švyturio apšvietimu). Tačiau šis dizainas, kaip ir kitos gerai žinomos sistemos, neleidžia išspręsti autonominės žvalgybos ir diagnostikos problemų grąžinant platformą su įranga į nurodytą tašką. Problema sprendžiama pasitelkus siūlomą valdomo parašiuto sistemą, kuri nusitaiko į reikiamoje vietoje esantį švyturį ir turi sklandantį „sparno“ tipo parašiutą, krovininę platformą, nuosekliai sujungtą švyturių aptikimo bloką, komandą. blokas, kurio antrasis išėjimas yra prijungtas prie švyturių aptikimo bloko ir bloko parašiutų linijų valdymo įvesties. Valdomoje parašiuto sistemoje papildomai yra nuosekliai sujungta inercinė navigacinė sistema, kurios antrasis išėjimas yra prijungtas prie antrojo komandų bloko įėjimo, blokas valdymo signalams generuoti įjungimui/išjungimui ir pradinėms inercinės navigacijos sąlygoms nustatyti. sistema, kurios antrasis išėjimas yra prijungtas prie inercinės navigacijos sistemos įėjimo, trečiasis išėjimas ir antrasis įėjimas atitinkamai prijungtas prie švyturio aptikimo bloko ir Žemės paviršiaus diagnostikos bloko antrojo įėjimo ir antrojo išėjimo. plotas. PS skrydis tam tikra trajektorija vykdomas keičiant aerodinaminius parametrus komandomis iš inercinės navigacijos sistemos, o PS pasukimas atbuline kurso ir tūpimas švyturio zonoje atliekamas keičiant parašiuto aerodinaminius parametrus pagal stropo valdymo bloko ir švyturių aptikimo bloko, kuris ieško tūpimo vietoje, komandas. Naudojant parašiuto sistemą su grįžimu į tam tikrą žemės paviršiaus tašką, galima pasiekti krovinio iškrovimo tikslumą per 5–60 m, priklausomai nuo naudojimo sąlygų, sumažinti žalingo poveikio žmogaus organizmui riziką, o taip pat pakartotinai ir pigiai naudoti sistemą įvairiomis oro sąlygomis ir skirtingu paros metu. Taigi, yra naujas valdomos sistemos struktūrinis įgyvendinimas, taip pat neakivaizdūs ryšiai tarp sistemos blokų, leidžiantys įgyvendinti užduotį diagnozuoti sritį su grįžimu į tam tikrą tašką. žemės paviršių reikiamu tikslumu. Fig. 1 parodyta sistemos blokinė schema; pav. 2 yra IR diapazono švyturio aptikimo bloko schema; pav. 3 - komandų bloko blokinė schema; pav. 4 yra parašiuto linijų valdymo konteinerio blokinė schema; pav. 5 - inercinės navigacijos sistemos blokinė schema; pav. 6-9 yra bloko, skirto generuoti valdymo signalus, skirtus įjungti / išjungti ir nustatyti pradines inercinės navigacijos sistemos sąlygas, veikimo bloko schema. Valdoma parašiutų sistema (PS), skirta diagnozuoti tam tikrą Žemės paviršiaus plotą, apima sklandantį parašiutą 1 su krovinio platforma, švyturių aptikimo bloką 2, komandų bloką 3, parašiutų linijų valdymo bloką 4 (valdymo konteinerį). nuosekliai, o inercinė navigacinė sistema 5, 6 blokas prijungtas nuosekliai - generuoja valdymo signalus įjungti/išjungti ir nustatyti pradines sąlygas inercinei navigacijos sistemai ir Žemės paviršiaus ploto diagnostikos blokui 7, o antrasis išėjimas komandų blokas 3 yra prijungtas prie švyturio aptikimo bloko 2 įėjimo, antrasis inercinės navigacijos sistemos 5 išėjimas yra prijungtas prie antrojo komandų bloko 3 įėjimo, antrasis bloko 6 išėjimas yra prijungtas prie valdymo bloko įėjimo. inercinė navigacijos sistema 5, o bloko 6 trečiasis išėjimas ir antrasis įėjimas yra atitinkamai prijungti prie švyturio aptikimo bloko 2 antrojo įėjimo ir antrojo išėjimo. Sistema naudoja serijiniu būdu valdomą sparno formos parašiutą, pavyzdžiui, UPG-0.1 arba PO-300, ir serijinę platformą Žemės paviršiaus diagnostikos blokui ir švyturio aptikimo blokui, turinčiam amortizatorių. elementai, mažinantys poveikį tūpimo metu. Įgyvendinti šiai sistemai būdingas funkcijas
A) Žemės paviršiaus ploto diagnostikos bloko 7 ir švyturio aptikimo bloko 2 valdymas pagal skrydžio laiko ciklogramą ir pradines sąlygas;
B) inercinės navigacijos sistemos 5 valdymas;
C) apdoroti informaciją, gaunamą iš inercinės navigacijos sistemos 5
Galima naudoti 6 bloką, generuojantį valdymo signalus įjungiant/išjungiant ir nustatant pradines sąlygas inercinei navigacijos sistemai (borto kompiuteriui). Tokio bloko pranašumas yra galimybė perkonfigūruoti integruotą programą iš bet kokio tipo IBM - 286, 386, 486, kuriose PS laiko sekos diagrama parašyta kaip programa aukšto lygio kalba. Valdymo signalų generavimo blokas, skirtas įjungti / išjungti ir nustatyti pradines inercinės navigacijos sistemos sąlygas, yra pagrįstas serijiniais elementais, pavyzdžiui, 1830 BE31. Priklausomai nuo užduoties, Žemės paviršiaus ploto 7 diagnostikos bloke gali būti jutikliai, skirti matuoti spinduliuotę (radaras, optinis ...), kamera, jutiklis temperatūrai, atmosferos užterštumui (matomo ir infraraudonųjų spindulių diapazone) matuoti ir kt. . Inercinė navigacijos sistema 5 apima bloką kompensavimo momentams generuoti 8, inercinių elementų bloką 9, skaičiavimo įrenginį 10 ir gali būti pagaminta pagal Fig. 5. Švyturio aptikimo blokas 2 - skiriasi priklausomai nuo bangų ilgių diapazonų, IR diapazonams gali būti IR švyturio jutiklis, kuris yra giroskopinis įrenginys su elektroniniu bloku ir skenavimo grandine, siurbimo mechanizmas, sekimo giroskopo rotoriaus pagreičio blokas , arba radijo sistema, kurioje yra radijo švyturys (signalo siųstuvas) ir radijo stoties imtuvas, pagamintas pagal superheterodino grandinę su vienu dažnio keitimu (pavyzdžiui, nuoseklioji radijo stotis P-855 A1). Tiriamo objekto (ugnies) spinduliavimas lęšiu fokusuojamas į stiklinį diską-rastrį su kintančiais skaidriais ir nepermatomais sektoriais. Tokiu atveju sektorių porų skaičius nuo krašto iki centro padidėja nuo 6 iki 12 vienetų. Rastras yra centre lęšio optinės ašies atžvilgiu ir kartu su pastarąja montuojamas ant giroskopo rotoriaus. Ant pastarojo kardaninės pakabos yra įrengtas fotodetektorius, tarp jo ir rastro įrengtas šviesos kreiptuvas. Giroskopo rotorius yra nuolatinis dviejų polių magnetas, kurio dažnį fp palaiko nuolatinė elektromagnetinė sistema. Signalas iš fotodetektoriaus praeina per polių filtrą, kurio rezonansinis dažnis fres = 12 fp, yra aptinkamas, sustiprinamas galios stiprintuvu ir patenka į korekcijos ritę. Sąveikaujant korekcinės ritės ir besisukančio nuolatinio magneto magnetiniams laukams, susidaro mechaninis momentas, kurio įtakoje giroskopas precesuoja norima kryptimi, išlaikydamas spinduliuotės šaltinį matymo lauke. Nustatytame sekimo režime korekcijos srovė yra proporcinga matymo linijos kampiniam greičiui. Iš srovės formuojama valdymo komanda, atitinkanti kampinį matymo greitį. Ryšys tarp kilnojamųjų ir fiksuotų atskaitos sistemų, sujungtų atitinkamai su giroskopo rotoriumi ir įrenginio korpusu, nustatomas naudojant atskaitos signalų generatoriaus (GON) jutiklio apvijas ir švyturio aptikimo bloko optinę ašį. GON apvijų išilginės ašys yra statmenos išilginei korpuso ašiai. Aptikimo bloko švyturio 2 siurbimo mechanizmas PS trajektorijoje, nuolydžio ir posvyrio kampai gali siekti +50 o . Giroskopo servo rotoriaus siurbimo kampas 40 o . Todėl atsiranda būtinybė pasukti švyturio aptikimo bloką PS trajektorija, kai sekimo giroskopas artėja prie konstrukcinio sustojimo ir objekto (gaisro) automatinis sekimas gali sugesti. Dovorot suteikia stotelės ištraukimą iš sekimo giroskopo. Siurbimo mechanizmas užtikrina gaminio pasukimą į dvi dalis statmenos plokštumos aplink ašis, einančias per ritinius GON-0 o ir GON-90 o, ir švyturio aptikimo bloko centrą jo skerspjūvyje. Sukimasis aplink ašis, susijusias su GON rite, užtikrina, kad būtų palaikoma susijusi koordinačių sistema. Skenavimo grandinė užtikrina giroskopo rotoriaus valdymą per korekcinius ritinius pagal tam tikrą įstatymą. Detektoriuje nustatomos informacinio signalo slenkstinės reikšmės ir sugeneruojama komanda išjungti nuskaitymą, dezorientuoti sekimo giroskopą ir pradėti automatinį objekto (pavyzdžiui, laužo) sekimą. Vieno švyturio aptikimo bloko 2 įgyvendinimo pavyzdys parodytas Fig. 2. Švyturio jutiklis generuoja valdymo signalą, proporcingą kampiniam regėjimo linijos greičiui, kurio reikšmė apskaičiuojama pagal IR kanalo signalus arba radijo signalus 2 statmenose plokštumose. Komandų bloke 3 yra standartiniai elementai - fazių guolių detektorius, guolių signalo skirtumo skaičiuotuvas, guolio nulinis skaitiklis, korekcijos jungiklis, valdymo komandos generavimo įtaisas ir gali būti pagamintas mikroprocesoriaus pagrindu. Vieno iš 3 bloko įgyvendinimo variantų pavyzdys parodytas Fig. 3. Parašiutinių linijų valdymo bloko 4 (valdymo konteinerio) blokinė schema parodyta Fig. 4. Orlaivio valdymo ir paleidimo į skrydžio trajektoriją ir grįžimo į pradinį tašką procesas gali būti pavaizduotas šiais etapais: orlaivio programinio skrydžio etapas pagal duotą skrydžio užduotį; PS apsivertimo atvirkštine kurso stadija; pasitraukimo į nusileidimo švyturio zoną ir PS nusileidimo etapas. Išradimas gali būti įgyvendintas taip:
Prieš orlaivio skrydį klaviatūra įvedamas 6 blokas, skirtas generuoti valdymo signalus įjungti/išjungti ir nustatyti pradines PS inercinės navigacijos sistemos sąlygas su skrydžio užduotimi, vaizduojančia skrydžio trajektorijos parametrus, skrydžio aukštis virš diagnostinės zonos ir skrydžio laiko ciklograma. Atsižvelgiant į skrydžio sąlygas, skrydžio laiko seka, priklausomai nuo skrydžio sąlygų, apima Žemės paviršiaus ploto 7 diagnostikos bloko veikimo pradžios ir pabaigos laiką arba diapazoną, švyturio įjungimo laiką. 2 aptikimo blokas (jei reikia), kad paryškintų diagnozuotą zoną Žemės paviršiuje. Pilotas nugabena orlaivį (sraigtasparnį) į tam tikrą zoną ir bet kokiu žinomu būdu, pavyzdžiui, konvejeriu, išmeta parašiuto sistemą su krovinine platforma per vežėjo krovinio liuką. Atkūrimo momentu prasideda PS skrydžio pradžios atgalinis skaičiavimas. Stabilizavus PS, prasideda skrydžio režimas pagal užprogramuotą trajektoriją, vykdomas naudojant inercinę navigacijos sistemą 5. Signalai iš inercinių elementų bloko 9, įskaitant akselerometrus ir giroskopinius kampinio greičio jutiklius, apdorojami skaičiavimo įrenginyje 10 ir įvesti kompensavimo momentų generavimo bloką 8. Signalai iš bloko inercinės navigacijos sistemos 5 paduodami į komandų bloką 3. Komandų bloke 3 generuojami signalai, kurie patenka į parašiuto linijų 4 valdymo bloką, kad būtų sugriežtintos valdymo linijos ( kairėje, dešinėje) parašiuto. Pakeitus parašiuto aerodinamines charakteristikas, pasikeičia PS trajektorijos parametrai, kurie iš karto užfiksuojami inercinių elementų bloke 9 naudojant akselerometrus. Pagal 10 bloko 9 bloko informaciją apskaičiuojamas skrydžio nuotolis ir greitis, kurie fiksuojami 6 bloke, kad būtų generuojami valdymo signalai įjungimui/išjungimui ir pradinėms inercinės navigacijos sistemos sąlygoms nustatyti kaip skrydžio funkcija. laikas skaičiuojamas nuo nulio momento. Pasiekus skrydžio užduočiai reikalingą laiką arba atstumą, iš 6 bloko siunčiama komanda įjungti Žemės paviršiaus ploto 7 diagnostikos įrenginį. Žemės paviršiaus ploto 7 diagnostikos blokas įjungiamas pagal komandas iš blokas 6 valdymo signalams generuoti įjungti/išjungti ir nustatyti pradines sąlygas inercinei navigacijos sistemai.sistemai arba iš švyturių aptikimo bloko 2, jeigu apžiūros zonoje (dega miškas ir pan.) yra ryškus švyturys. Žemės paviršiaus 7 blokinės diagnostikos įtraukimo būdas nustatomas pagal skrydžio laiko ciklogramą, sudarytą kiekvienam konkrečiam PS pritaikymui. Nurodyto laiko valdymas 6 bloke vykdomas programiškai. Nurodytas nuotolio valdymas atliekamas pagal informaciją iš inercinės navigacijos sistemos 5 dėl dvigubo PS pagreičio integravimo. Žemės paviršiaus ploto 7 diagnostikos bloko fiksavimo, matavimo ir fotografavimo prietaisų veikimo pabaiga taip pat atliekama iš borto kompiuterio 6. Pasibaigus diagnozuoti žemės paviršiaus plotą. Žemės paviršiuje PS pradeda įjungti atbulinį kursą dėl komandos valdyti linijas, kuri perduodama parašiutų linijų 4 valdymo blokui, kai tai išjungia inercinę navigacijos sistemą 5 ir kampinio greičio valdymą. matymo liniją ir pradeda suktis PS 180 o . Atlikus posūkį 180 o, įjungiama inercinė navigacijos sistema 5, iš kurios informacija siunčiama į komandų bloką 3, kad būtų generuojamas atitinkamas stropų valdymo signalas. PS grąžinimas į nurodytą švyturio vietos zoną (nutūpimas) vykdomas dėl PS programinio skrydžio pagal inercinės navigacijos sistemos 5 komandas, o pradinės sąlygos įvedamos į inercinę navigacijos sistemą. iš 6 bloko atminties. Norint pašalinti nusileidimo taško skrydį tam tikru laiku iš 6 bloko, duodama komanda įjungti švyturio aptikimo bloką 2, kuris ieško švyturio. Pasirodžius signalui iš švyturio (IR, MM, kombinuotas), inercinė navigacijos sistema 5 atjungiama nuo PS valdymo ir perjungiama į budėjimo režimą. Kad būtų išvengta klaidingų švyturių užfiksavimo, parašiuto sistema turi turėti atitinkamą artėjimo švyturiui valdymo algoritmą, pvz., užtikrinti dvigubą perėjimą per švyturį, organizuoti kombinuotą švyturių aptikimo bloką, kurio buvimas gali žymiai padidinti švyturio atsparumą triukšmui. jutiklis. Atpažinus švyturėlį, PS pasisuka į švyturį. Posūkio momentas nustatomas pagal guolio signalo dydį atitinkamoje koordinačių sistemoje. Pasibaigus posūkiui link švyturio, prasideda vedimo į švyturį etapas. Valdymas atliekamas dviem PS koregavimo signalo komponentais. MS greičio vektorius visada nukreiptas išilgai švyturio matymo linijos. Kad būtų išvengta klaidingų švyturio užfiksavimo, parašiuto sistema turi du kartus pereiti švyturį. Sistemai pereinant per švyturį, pirmą kartą suveikia guolio skaitiklis, kurio signalu 3 komandų bloke sugeneruojama linijos valdymo komanda, kuri perduodama parašiutų linijų valdymo blokui 4. tuo pačiu metu išjungiamas valdymas pagal kampinį matymo linijos greitį ir PS pradeda suktis nuo švyturio iki 360 o. Atlikus posūkį 360°, PS skrenda kursu link švyturio iki antrojo važiavimo virš objekto momento. Antrojo važiavimo guolių skaitiklio fiksavimo virš švyturio momentu abi valdymo linijos yra įtemptos, kad paspartėtų sistemos nusileidimas ir būtų pasiektas nurodytas guolio kampas, kuris yra optimalus planuojant į švyturį. Po to yra posūkis link švyturio, kuris atliekamas kaip parodyta aukščiau. Jei švyturys neužfiksuojamas, informacija iš inercinės navigacijos sistemos 5 analizuojama 6 bloke, kad būtų generuojami valdymo signalai, skirti įjungti/išjungti ir nustatyti pradines inercinės navigacijos sistemos sąlygas, ir, priklausomai nuo analizės, pateikiama arba komanda. duodama nurodyti programos tašką Žemės paviršiuje arba duodama komanda tęsti PS skrydį pagal programos trajektoriją. Programinis taškas Žemės paviršiuje yra pseudošvyturys, kurio koordinatės formuojamos remiantis informacija iš inercinės navigacijos sistemos.
REIKALAVIMAS
Valdoma parašiutų sistema, kurią sudaro sklandantis parašiutas su krovinine platforma, nuosekliai sujungtas švyturių aptikimo blokas, komandų blokas, kurio antrasis išėjimas prijungtas prie švyturio aptikimo bloko įvesties, ir parašiutų linijų valdymo blokas, pasižymintis tuo, kad jis papildomai yra nuosekliai sujungta inercinė navigacijos sistema, antroji, kurios išėjimas yra prijungtas prie antrojo komandų bloko įėjimo, blokas, skirtas generuoti valdymo signalus įjungti / išjungti ir nustatyti pradines inercinės navigacijos sistemos sąlygas, antrasis kurio išėjimas yra prijungtas prie inercinės navigacijos sistemos įvesties, trečiasis išėjimas ir antrasis įėjimas atitinkamai su antruoju įėjimu ir antruoju bloko išėjimu švyturio aptikimui ir bloku, skirtu diagnozuoti Žemės paviršius.Galimybė dislokuoti specialiųjų operacijų pajėgas į draudžiamas zonas yra neįkainojama, ypač kai tokios zonos yra dideliame aukštyje arba kai operacijoje dalyvauja karo šunys.
Valstybinės struktūros labiau pasikliauja specialiųjų operacijų pajėgų (SOF) pajėgų ir priemonių formavimo efektu bei jų gebėjimu slaptai įsiskverbti ir palikti operacijų zonas. Kai kurios šiuolaikinės techninės priemonės, kurias naudoja MTR skirtingos salys oro erdvėje yra pagrįstos naujomis pažangiomis sistemomis, galinčiomis tiksliai pristatyti operatorių grupes į nepasiekiamas vietas, įskaitant didelio aukščio reljefą su stačiais šlaitais.
Šios specifinės priemonės leidžia tiek mažoms, tiek didelės grupės parašiutininkų pavidalu slapta atvyksta į tikslines teritorijas atlikti įvairias kovines užduotis – nuo stebėjimo ir žvalgybos iki tiesioginės kovos, taip pat karinės pagalbos teikimo. Šiandien užduočių spektras labai išsiplėtė ir apima humanitarinės pagalbos scenarijus ir pagalbos nelaimių atveju operacijas.
Norint susidoroti su laikmečio iššūkiais, būtina drąsiai naudoti naujų modelių parašiutus nuo modernios medžiagosžmonėms ir kroviniams numesti, taip pat papildomai įrangai ir įrangai dideliame aukštyje, pavyzdžiui, tiekti deguonį ir numesti specialią įrangą, įskaitant šunis.
Netrukus po to, kai pademonstravo savo sklandantį parašiuto sistemą su savaime prisipučiančiu apvalkalu RA-1 neskelbiamais kiekiais tiekiama Jungtinių Valstijų Specialiųjų operacijų pajėgų vadovybei (USSOCOM), „Airborne Systems North America“ paskelbė, kad savo parasparnių šeimą papildė dar vienu nariu.
Ši naujausia sistema, paskirta Sveiki-5. buvo sukurtas reaguojant į šiandienos veiklos poreikius, kad būtų padidintas nuotolis ir naudingoji apkrova ilgam ir trumpam šokinėjimui parašiutu iš didelio aukščio.
Kompanijos atstovas paaiškino, kad „Hi-5“ sistema suteikia „kariškiams unikalių galimybių ir gali ne tik puikiai sklandyti tolimu atstumu, bet ir leidžia keisti sklandymo kampą, kad būtų galima greitai nusileisti ir tiksliai nusileisti“.
 Amerikos specialiosios pajėgos yra mokomos šuolių į tolį dienos metu, praktikuojantis slaptą nusileidimą tikslinėse srityse
Amerikos specialiosios pajėgos yra mokomos šuolių į tolį dienos metu, praktikuojantis slaptą nusileidimą tikslinėse srityse
Planavimo galia
Buvusios parašiutų sistemos dažnai buvo specializuoti sprendimai, su kuriais buvo galima atlikti arba slaptą tolimą nusileidimą iš didelio aukščio, arba nusileidimą ant vandens, arba atvirus šuolius iš mažo aukščio, labiau tinkančius įprastiems junginiams ar dideliems specialiųjų pajėgų desantininkams.
„Airborne Systems North America“ duomenimis, parašiutų sistema Hi-5 turi 5,5:1 pakėlimo ir pasipriešinimo santykį (palyginti su dabartiniais sklandytuvais, kurių keliamosios jėgos ir pasipriešinimo santykis skiriasi nuo 3:1 iki 4:1) su papildoma galimybe greitai pereiti prie 1:1 aerodinaminio sparno santykio (slydimo). santykis) valdomas slydimo moduliavimo sistema. (aerodinaminė kokybė – keliamosios jėgos ir pasipriešinimo santykis)
« Skirtingai nuo kitų nusileidimo kampo valdymo metodų, tokių kaip apdailos ąselės, slydimo moduliavimo sistema nepadidina bendro parašiuto greičio ir užtikrina saugų perėjimą bet kuriame aukštyje. Tai pašalina daugelio spiralių ar serpantinų manevrų poreikį mažame aukštyje ir leidžia labai tiksliai nusileisti dėl saugaus artėjimo tiesiai.“, – sakė įmonės atstovas.
„Pasišokęs parašiutininkas visiškai kontroliuoja savo padėtį ir nusileidimo į tikslinę zoną momentą. Be kokybinio proveržio santykinio planavimo diapazono technologijose, Hi-5 sistema turi daug teigiamų savybių. Šuoliui parašiutu jį lengva prižiūrėti ir lengva valdyti, o stautuokliui su parašiutu – krovimo procesas yra intuityvus. Jis užpildo atotrūkį tarp mūsų „Intruder RA-1“ ir „Hi-Glide“ parašiutų, suteikdamas aukštos aerodinaminės kokybės sparną tiksliam nusileidimui ir galimybę saugiai nusileisti į sunkiai pasiekiamas vietas.
 Hi-5 parašiutų sistema, sukurta Airborne Systems North America
Hi-5 parašiutų sistema, sukurta Airborne Systems North America
Jo dizainas pagrįstas papildomais jungikliais, įtaisytais priekinėse parašiuto linijose, todėl parašiutininkas gali sklandžiau keisti baldakimo aerodinaminę kokybę nuo 5,5:1 iki 1:1 (pavyzdžiui, jei 5,5:1, tai už kiekvieną 100 metrų aukščio praradimas, didžiausias sklandymo atstumas esant nuliui vėjui yra 550 metrų). Bendrovės teigimu, parašiuto sistema turi atsarginį stogelį ir užtikrina beveik tylų veikimą slaptų operacijų metu.
Hi-5 sistemoje yra 11 segmentų elipsinis parasparnio stogelis, kurį galima pastatyti ant maksimalus aukštis 7600 metrų virš jūros lygio. Tačiau parašiutas turi atsidaryti bent 1050 metrų virš jūros lygio. Parašiutas, gali atsidaryti Skirtingi keliai nuo virvelės ar spyruoklinio išstumiamo piloto latako iki rankiniu būdu išskleidžiamų sistemų.
Tačiau nuo 2016 m. spalio mėn., kai buvo pristatyta Hi-5 sistema, Airborne Systems North America sukūrė Hi-5 parašiutą su baldakimu. didesnio dydžio, jo plotas padidintas nuo 34 m 2 iki 39 m 2, siekiant padidinti keliamąją galią nuo 220 iki 250 kg.
„Tai leidžia mums tilpti į tandeminio šokinėjimo svorio diapazoną, į kurį anksčiau niekada negalvojome“, – aiškino bendrovės vyriausiasis technologas.
„39 m2 kupolas suteikia galimybę slysti taip, kaip norite, arba leistis tiksliai taip, kaip norite, o jūs galite neštis antrą žmogų ar papildomą įrangą. Plečiasi operatyviniai reikalavimai šiuolaikiniam kariui, mūsų kariams reikia neštis daugiau technikos, įveikti didesnius atstumus, tiksliai ir saugiai nutūpti ankštose erdvėse. Hi-5 atitinka visus šiuos reikalavimus, o 39 m2 kupolas yra vienintelis kelias į priekį.
2016 metų pabaigoje Amerikos armija paskelbė apie ketinimą pirkti avansą parašiutų sistema RA-1 Išplėstinė Ram Air Parachute System (nuotrauka žemiau), kurią gali naudoti parašiutininkai, kvalifikuoti tiek šuoliams į tolimus, tiek trumpus (su virve), norėdami šokti iš 10 000 metrų aukščio. Jis turėtų pakeisti esamas MS-4 Ram Air Personnel Parachute parašiutų sistemas.
 Aukštumų užkariavimas
Aukštumų užkariavimas
Specialiųjų operacijų rinkoje „Complete Parachute Solutions“ (CPS) vaidina svarbų vaidmenį kuriant šuolių į aukštį technologiją. Pasak CPS atstovo Johno Basto, jo įmonė plečia savo pajėgumus, įskaitant remiamas ekspedicijas į Everesto kalną 2013, 2014, 2015 ir 2016 m., kurių tikslas – atlikti bandymus dideliame aukštyje, siekiant išbandyti naujus Everesto reikalavimus. modernios veiklos erdvės.
Bastas paaiškino, kad CPS Everest komanda neseniai grįžo iš Himalajų „su naujais nusileidimo dideliame aukštyje rekordais“ ir patvirtino naująją daugiafunkcinę taktinę deguonies sistemą. Atlikusi daugybę šuolių sraigtasparniu, CPS komanda teigė grįžusi iš šios misijos su dar 4 pasaulio šuolių į tolį rekordais, susijusiais su naudojimo paprastumu, dideliu aukščiu, tikslumu ir naudingumu.
Pirmieji šuoliai buvo atlikti iš sraigtasparnių, kylančių iš Syanbosh aerodromo Nepale. USSOCOM parašiutininkai, ypač karinio jūrų laivyno specialiųjų pajėgų ir JAV jūrų pėstininkų korpuso specialiųjų pajėgų atstovai, atliko šuolius iš maždaug 3800 metrų virš jūros lygio, nusileidimo metu kovodami su stipriu vėju, žema temperatūra ir deguonies trūkumu. , kai hipoksija tampa rimta problema. Kovodama su hipoksija, CPS rėmėsi naujos kartos „Top Out Aero“ MTOS (daugiafunkcia taktine deguonies sistema), leidžiančia operatoriams laisvai kvėpuoti „ekstremaliame aukštyje“.
Tačiau MTOS buvo naudojamas ne tik šuolių su parašiutu metu, ši sistema buvo naudojama ir žvalgybinėse misijose aukštumose, ruošiant nusileidimo aikšteles bei atliekant kitas didelio aukščio užduotis itin sudėtingoje vietovėje.
Tarp CPS sumuštų pasaulio rekordų buvo pirmasis nusileidimas 3800 metrų aukštyje, kurį atliko parašiutininkas, atlikęs mažiau nei 50 šuolių, išmokęs atlikti specialias misijas dideliame aukštyje. Basto teigimu, instruktorius ir buvęs jūrų pėstininkų korpuso snaiperis Kaylee Wojcik tapo pirmuoju „žemiausiu šuoliuku, sėkmingai nusileidusiu pučiant dideliam vėjui ir niūriame ore, o tai būdinga 3800 metrų aukštyje. Tai rimtas agresyvios baldakimo kontrolės išbandymas CPS teikiamose specialiose misijose ir pasiruošimo nusileidimui programose.
Kalbant apie aukščio rekordus, CPS instruktoriai atliko šuolio ir nusileidimo programą 4500 metrų aukštyje su Ama Dalam. Toje pačioje vietoje jūrų pėstininkų korpuso rezervistas kapitonas Kerolis su 32 kg sveriančia kuprine sėkmingai atliko šuolį į aukštį. Tada grupė persikėlė į Gorak Shep, kur jie nusileido beveik 5200 metrų aukštyje, ir į Kala Pattar kalną, kur buvo atliekami šuoliai nusileidus daugiau nei 5300 metrų aukštyje.
Galiausiai nauji rekordai buvo sumušti ir šuolių tandemais bei nusileidimų į 5100 metrų aukštyje, naudojant TP460 ir Special Operation Vector 3 Tandem Sigma parašiutus. Panaši koncepcija gali būti naudojama personalui, neapmokytam šuolių į tolį, atvesti į operacijos zoną, kur jie gali tęsti savo specialią užduotį.
 Desantininkų grupių paleidimą dažnai lydi didelio tikslumo krovininių platformų, kurios ant žemės tiekia taktines transporto priemones, greitaeigius katerius ir kitą specialią įrangą, kritimą.
Desantininkų grupių paleidimą dažnai lydi didelio tikslumo krovininių platformų, kurios ant žemės tiekia taktines transporto priemones, greitaeigius katerius ir kitą specialią įrangą, kritimą.
Specialių krovinių pristatymas
Be personalo dislokavimo parašiutu, krovinių ir kt specialiomis priemonėmis, įskaitant kovinius šunis, parašiutai išlieka svarbiausiu MTR elementu šiuolaikinėje veiklos aplinkoje.
NATO narės SOF, įskaitant JK ir Prancūziją, neseniai baigė gabenimo iš oro sistemų, skirtų numesti greitaeigius katerius ant jūros paviršiaus, vertinimą. Tai apima MCADS (Maritime Craft Aerial Delivery System) iš Airborne Systems, kuri gali gabenti iki 12 metrų ilgio valtis, įskaitant 9,5 metro Offshore Raiding Craft valtis iš Didžiosios Britanijos bendrovės Holyhead Marine.
Valties pristatymas
Didžiosios Britanijos ministerija 2017-2018 metais ketina įsigyti iš viso 14 platformų, skirtų laivams ir kateriams be sustojimo tipo MCADS pristatyti. Platformas PRIBAD 21 (Platform Rigid Inflatable Boat Aerial Delivery) galima numesti nuo karinių transporto lėktuvų C-130 Hercules, A400M, C-17 ir C-5 galinės rampos. Prancūzijos specialiosios pajėgos taip pat išbandė savo Zodiac Milpro Ecume RIB pristatymo sistemą.
Ši galimybė išlieka populiari daugelio šalių MTR, kurių padaliniai gali pristatyti nedidelius laivelius dideliais atstumais, kad galėtų įsiskverbti ir evakuoti specialias grupes.
Išmetus iš PRIBAD platformos orlaivio krovinių skyriaus, piloto latakas pirmiausia išskleidžiamas pagrindiniam stogeliui pratęsti. Sekdami krovinį savo parašiutais, pavyzdžiui, RA-1, šokinėja speciali grupė. Kovinėmis sąlygomis, siekiant užtikrinti operacijos slaptumą po aptaškymo, PRIBAD sistemos padėklas gali būti užtvindytas, nors kovinio mokymo metu padėklai dažniausiai lieka ant paviršiaus dėl specialių pakartotiniam naudojimui skirtų plūdžių.
Be to, Didžiosios Britanijos gynybos departamentas svarsto apie panašią taktinių transporto priemonių ir kitos įrangos saugaus nusileidimo technologiją. 2016 metais koviniai vienetai įvertino Airborne Systems gaminamą vidutinio įtempimo parašiutą (MSP), galintį leisti iki 3175 kg svorį, leidžiantį mesti įvairius transporto priemonių, įskaitant specialias „Polaris Defense“ transporto priemones MRZR-2 ir MRZR-4.
Kaip ir PRIBAD 21 platformoje, MSP pilotinis latakas išskleidžia pagrindinį pneumatiniu būdu suminkštintos angos, galinčios saugiai nukelti taktines transporto priemones, stogelį. MSP sistema skirta nusileisti iš karinių transporto lėktuvų C-130J ir A400M.
Tačiau Gynybos departamentas jau siekia pakeisti atnaujintą MSP technologiją „Airborne Systems“ oro tiekimo sistema ATAX, galinčia gabenti iki 7260 kg didžiausios masės naudingąjį krovinį. ATAX sistema skirta tiekti antžeminę ir jūrinės platformos, nors gynybos šaltiniai negalėjo patvirtinti, kada įvyks perėjimas prie naujų sistemų.
Kaip paaiškino Bastas, CPS sukūrė kitą „Complete Parachute Autonomous Delivery System“ versiją, kuri skirta itin lengviems kroviniams, sveriantiems nuo 115 iki 270 kg.
Tvarkomas krovinys
„Ši valdoma pristatymo sistema taip pat suteikia aukštas lygis nusileidimo tikslumas tam tikrame taške ir, kaip taisyklė, naudojamas grupėse, atliekančiose šuolius į tolimus, kaip kovos misijos efektyvumo didinimo priemonę. Tai suteikia papildomų galimybių paieškos ir gelbėjimo komandoms tiksliai pristatyti reikiamas medicinos priemones ir gelbėjimo įrangą“, – tęsė jis, taip pat atkreipdamas dėmesį į tokių karinių specialistų poreikį humanitarinės pagalbos ir gelbėjimo operacijų srityje.
„Daugeliui Gynybos departamento padalinių, turinčių MFF (karinio laisvojo kritimo) personalą, taip pat pavesta reaguoti į stichines nelaimes atokiose vietovėse su labai ribotomis nusileidimo zonomis. Nuolat bandomas labai atšiauriomis sąlygomis Evereste, MS-360 parašiuto sparnas pasirodė esąs labai efektyvus „universalus parašiutas“, leidžiantis gelbėtojų komandoms tiksliai nusileisti ribotose tūpimo vietose“, – aiškino Bastas. Jis taip pat pažymėjo, kad JAV miškų apsaugos agentūros parašiutinės ugniagesių brigados pradėjo pereiti nuo esamų apvalių parašiutų prie CPS CR-360 parasparnių, kad būtų galima tiksliau pristatyti personalą į nurodytas vietas.
 Tikslaus pristatymo krovinių platformos, pažymėtos infraraudonųjų spindulių lemputėmis, užtikrinančiomis teigiamą savęs identifikavimą, artėja prie nusileidimo vietos
Tikslaus pristatymo krovinių platformos, pažymėtos infraraudonųjų spindulių lemputėmis, užtikrinančiomis teigiamą savęs identifikavimą, artėja prie nusileidimo vietos
šunų darbas
Taip pat nereikėtų pamiršti apie darbinių šunų (arba K-9) pristatymą į veikimo zoną, kurie yra „pritvirtinti“ prie operatorių, dislokuotų parašiutinėse sistemose, tokiose kaip parasparnis. Kaip paaiškino Bastas, pastaraisiais metais K-9 naudojimas paieškos, gelbėjimo ir kovinėse operacijose eksponentiškai išaugo, nes SOF vienetai labai priklauso nuo šunų, atlikdami įvairias užduotis: nuo stebėjimo / žvalgybos, tiesioginės kovos, karinės ir humanitarinės. pagalba, pagalba ekstremaliose situacijose.
CPS specialiai sukūrė du sprendimus, K-9 Jump Bag ir Mannequin Solution, skirtus tarptautinei CCO bendruomenei, kad palaikytų atitinkamai operacijas ir mokymo scenarijus, įskaitant tandeminius šunų šuolius.

Į CPS gaminių, skirtų šuoliams į aukštį, sąrašą, kurių daugelis yra naudojami su įvairių šalių MTR, taip pat yra sutvirtinimų, tokių kaip parašiutų linijos, petnešos ir linijos tvirtinimai. Be to, bendrovės portfelį sudaro MS, M1 ir M2 parašiutų serijos, specialiai sukurtos „daugeliui dislokacijų, pasižyminčios puikiu stabilumu, manevringumu ir didesniu nuotoliu“.
„MS M1/M2 modeliai šiuo metu naudojami specialiųjų pajėgų visame pasaulyje, suteikiantys galimybę leistis ribotose vietose stabdžių sistemų pagalba. skirtingo tipo“ – pasakė Bastas. Jis apibūdino MS-M4 kaip sistemą, kurią galima naudoti šuoliams į tolį ir su virve, skirtingai nei MS-M1 ir MS-M2, kurie skirti tik šuoliams į tolį.
„Šuolio parašiutas MS-360-M4 yra patobulinta MS-M2 versija. Slydimo charakteristikos buvo gerokai patobulintos, daugiau nei 33%, o tai leido mums pasiekti aerodinaminę kokybę (santykinį sklandymo diapazoną) nuo 3,5:1 iki 4:1, priklausomai nuo konfigūracijos ir apkrovos.
„Mūsų eksperimentinė programa parodė, kad keletas nedidelių esamų MS parašiutų konstrukcijos pakeitimų, daugiausia pakeitus stogelio formą ir jungiklius, pagerino kėlimo ir pasipriešinimo santykį. MS-M4 yra pagrįstas mišriu dizainu, išlaikant poliesterio pakabos linijas, buvo pašalintos nepageidaujamos vibracijos, susijusios su linijos pratęsimu, o tai galėjo turėti įtakos slydimo kokybei“, – aiškino Bastas.
Parašiutas MS-360-M4 turi 33 m 2 kupolo plotą, 9 metrų sparnų plotį, gali atlaikyti iki 205 kg svorį. Su juo galite šokinėti iš 10 500 metrų aukščio (standartinis lėktuvo skrydžio aukštis), o (šiek tiek pakoregavus) iš minimalaus – vos 900 metrų aukščio.
Tuo tarpu Rusijos specialiosios pajėgos pradėjo gauti specialius parašiutų sistema Arbalet-2 sukūrė AE Zvezda. Anot Gynybos ministerijos, Rusijos specialiųjų pajėgų brigadų specialiosios pajėgos Arkties sąlygomis visus 2016 metus išbandė įrangą, vykdydamos desantinius nusileidimus iš mažo aukščio, kad greitai patektų į nurodytas zonas.
Anot bendrovės „Zvezda“, su specialios paskirties parašiutų sistema „Arbalet-2“ galite šokti tiek iš lėktuvų, tiek iš sraigtasparnių skrydžio greičiu iki 350 km/h; kurio skrydžio svoris yra iki 160 kg, jis užtikrina patikimą veikimą iki 4000 metrų aukštyje.
 Speciali parašiutų sistema Arbalet-2
Speciali parašiutų sistema Arbalet-2
Arbalet-2 sklandantis parašiutas, kurio vertikalaus nusileidimo greitis ne didesnis kaip 5 m/s, o horizontalus nusileidimo greitis ne mažesnis kaip 10,5 m/s, pasižymi puikiu manevringumu (360 laipsnių posūkis per 8 sekundes), įskaitant pastovus nusileidimas neramioje atmosferoje. Parašiutas taip pat įjungiamas naudojant rankinio išskleidimo nuorodą, dešine arba kaire ranka.
Kadangi bendroje operacinėje erdvėje išlieka didelis dėmesys SOF naudojimui, reikalingi pažangūs pajėgumai, kad darbuotojai būtų pristatyti į sudėtingas kovinių operacijų sritis. Parašiutų puolimas iš didelio aukščio išliks pagrindine specialiųjų pajėgų, siekiančių slaptai nusileisti tam tikrose vietose, taktine technika. Nuolatinis parašiutų sistemų aerodinaminių savybių gerinimas leis remti aviaciją dislokuoti nusileidimo grupes iš saugaus atstumo ir saugaus aukščio bei sumažinti priešo priešlėktuvinių sistemų, ypač nešiojamų priešlėktuvinių raketų sistemų, apšaudymo riziką.



