2017. december 29. ügynökség "Interfax-AVN", egy új, akár négy tonna súlyú irányított ejtőernyős platform, amelyet számos orosz cégek, biztosítja a rakomány adott pontra történő szállításának nagy pontosságát. Erről pénteken számoltak be az Interfax-AVN-nek a hadiipari komplexumban.
A Joint Precision Airdrop System (JPADS) amerikai irányítású ejtőernyős platformjai repülés közben (c) az amerikai hadsereg
"Ezt az ejtőernyős platformot áruszállításra kell használni a légideszant erők, valamint más szerkezetek érdekében" - mondta az ügynökség beszélgetőtársa.
Elmondása szerint az automatikus vezérlőrendszer lehetővé teszi az ejtőernyős rendszert nagy pontosságú hogy a lehető legkisebb vízszintes és függőleges sebességgel szálljon le a föld felszínének adott pontján.
"A teljes repülés alatt az irányítás automatikus üzemmódban történik. Lehetőség van a leszállási pont koordinátáinak megváltoztatására repülés közben. A Glonass / GPS műholdas navigációs rendszerek jeleit használó navigációval ellátott platformvezérlő rendszer biztosítja a leszállást pontossággal, 100 m-es körkörös valószínű eltéréssel" – mondta. ügynökségi beszélgetőtárs.
Elmondta, hogy a projektben részt vesz a S. V. Iljushinről elnevezett Repülési Komplexum, az Aeroelasztikus Rendszerek Kutatóintézete, az Universal és az Aviatrans cégek.
Denis Fedutinov, a pilóta nélküli rendszerek orosz szakértője szerint ennek a feladatnak a relevanciája az áruk kiszállításának pontosságának javítása miatt van, amit gyakran a rendelkezésre álló technikai eszközök nem biztosítanak.
"Amikor sikeres megvalósítása ez a projekt Feltételezhetjük annak lehetőségét, hogy ezt a platformot nemcsak általánosságban az Orosz Fegyveres Erők és konkrétan a légideszant erők előtt álló problémák megoldására használhatjuk, hanem más struktúrák, például a rendkívüli helyzetek minisztériuma számára is” – mondta D. Fedutinov.
bmpd megjegyzése. A menedzseltek témái ejtőernyős platformok külföldön széles körben kifejlesztett, ahol már jelentős számú ilyen rendszert hoztak létre, beleértve azokat is, amelyek alkalmazásra találtak a nyugati fegyveres erőknél. Különösen a kanadai MMIST cég Sherpa irányított ejtőernyős rendszerei, amelyet 2004 óta használ az amerikai tengerészgyalogság Irakban, és amelyet számos NATO-ország fegyveres erői is üzemeltetnek, aktívan alkalmazzák. A Sherpa rendszer lehetővé teszi akár 10 ezer font (4500 kg) súlyú ejtőernyős platformok használatát. A Sherpa motoros változatban is használható.
2006 óta az Egyesült Államok hadserege és légiereje üzemelteti a közös fejlesztésű Joint Precision Airdrop System (JPADS) rendszert, amelyet az Airborne Systems North America (a brit Airborne Systems cég amerikai leányvállalata) gyárt tömegesen, és amelynek változatai lehetővé teszik a 40 ezer font (18 tonna) súlyú ejtőernyős platformok (bár valójában az Egyesült Államok légiereje legfeljebb 10 ezer font - 4500 kg -os terhelésű rendszereket vásárol). A jelentések szerint a rakomány szállításának "küszöb" pontossága a JPADS platformok könnyű változatainál 150 m, a 10 ezer font súlyú platformnál pedig 250 méter, egészen 2000 fontig (900 kg).
Az amerikai hadsereg 2016 óta teszteli a JPADS irányított ejtőernyős platformok lehetőségeit műhold helyett optikai korrelációs irányítórendszerrel, amely kiküszöböli az ellenség GPS-vevőkkel való interferenciáját és növeli a kézbesítési pontosságot.
ZVO 5/2007, 46-51
AMERIKAI ejtőernyős "ONYX"
S. PROKOFIEV 2. rangú százados
A hadviselés egyik jellemzője modern körülmények között Az afganisztáni és iraki katonai műveletekben egyértelműen megmutatkozott a különleges erők egységek (SPN) széles körű alkalmazása a konfliktusok kialakulásának és fejlődésének minden szakaszában. A különleges erők egységeinek a harci küldetések területére való kivonásának egyik fő módja az ejtőernyős leszállás volt és maradt. A jövőben ejtőernyős rakományrendszerek (PGS) segítségével megszervezik számukra a szükséges rakomány légi úton történő szállítását.
Ez a cikk egy olyan kiadványsorozatot indít, amely az erők ejtőernyős rendszereinek és leszállóberendezéseinek fejlesztésével foglalkozik speciális műveletek NATO országok.
A 2001 októberétől 2004 júliusáig tartó afganisztáni és iraki hadműveletek során az amerikai szárazföldi erők parancsnoksága éjjel és nappal 27 alkalommal alkalmazott különböző partraszálló erőket. Ebből hét ejtőernyős, köztük egy nagy magasságból történő leszállással és az ejtőernyő nyitásának hosszú késleltetésével, a többi - helikopterről leszállási módszerrel. Osztályokon és egységeken alapultak légideszant csapatokés különleges műveleti erők. Ezen túlmenően a tengerészgyalogság parancsnokságai és az amerikai haditengerészet különleges műveletei alkalmaztak leszállásokat, beleértve az ejtőernyőket is.
Például 2004 júniusában az amerikai tengerészgyalogság éjszakai ejtőernyősei partra szálltak Irakban, hogy az ellenállási erők számára fegyverekkel és lőszerekkel szállítva lesből csapjanak le egy konvoj előrehaladásának útjain. Először 3000 m feletti magasságból és a leszállóhelytől több kilométeres távolságból egy felderítő csoportot dobtak ki egy KS-130-as repülőgépről. A kidobás a segítségével történt irányított vitorlázó ejtőernyős rendszerek (UPPS) az ejtőernyők azonnali kinyitásával. Leszállás után a felderítők átvizsgálták a leszállóhelyet, megfigyelőállásokat állítottak fel a kerület mentén, és rádiójeladókat szereltek fel az ejtőernyősök célzott leejtésének biztosítására. A leszállás nagy részét (kb. 60 fő) két CH-46E helikopter dobta ki körülbelül 300 m magasból.
Az amerikai fegyveres erők vezetésének jelenlegi tervei a különleges műveleti erők (SOF) számának növelését irányozzák elő. A tervek szerint a szárazföldi erők különleges erői (légideszant) csoportjai részeként további egy zászlóaljat, valamint a haditengerészet különleges erőinél egy-egy további különleges erők felderítő búvár különítményét tervezik. 2006. október elejére befejeződött az amerikai tengerészgyalogság különleges hadműveleti parancsnokságának megalakulása, amely két zászlóalj különleges erőkből és támogató egységekből állt. teljes erő 2500 ember. Ezen egységek minden katonai személyzetének ejtőernyős ugrást kell végrehajtania. Hasonló szervezési és személyzeti tevékenységet, bár kisebb léptékben, az Egyesült Államok NATO-szövetségesei, elsősorban Nagy-Britannia, Franciaország, Németország, Hollandia és Norvégia végeznek.
Külföldi szakértők megjegyzik, hogy az elmúlt évtizedekben megváltoztak az ejtőernyősök leszállásának módszereivel kapcsolatos nézetek. Különösen az MTR katonák száma nőtt, amelyeknél a feladatterületre való kivonulás fő légi úton a NANO (High Altitude High Opening - „leszállás nagy magasságból azonnali ejtőernyőnyitással”) és a HALO leszállási módszerei lettek. (High Altitude Low Opening – „leszállás nagy magasságból az ejtőernyő nyitásának hosszú késleltetésével”).
Például az 1990-es évek végén az egyesült államokbeli különleges erők zászlóaljánál csak egy „Alpha” rendes hadműveleti különítmény volt (12 fő), a Haditengerészet Különleges Erők különítményében pedig egy szakasz (16 fő), amelynek személyzete speciális kiképzésen esett át. A UPPS a készletben volt, és felkészült volt arra, hogy a fenti leszállási módszerek segítségével harci küldetéseket hajtson végre.
Jelenleg a Különleges Erők zászlóaljánál három főállású Alpha-különítmény (századonként egy), a Tengerészeti Különleges Erők különítményénél pedig két szakasz áll készen a partraszállásra ezekkel a módszerekkel. A tengerészgyalogság különleges erőinek újonnan alakult zászlóaljaiba tartoztak az MP-osztály egykori mélységi felderítő századai (egyenként körülbelül 100 fő), amelyek személyi állománya teljes mértékben kiképzett nagy magassági ejtőernyős ugrásra.
Külföldi szakértők szerint ezeknek a leszállási módszereknek a használata növeli a különleges erők egységei akcióinak titkosságát, mivel nem teszi lehetővé az ellenség számára, hogy megbízható pontossággal meghatározza a leszállóhelyeket, és még a leszállás tényét sem észleli. Ezen túlmenően, tekintettel az eszközök jelenlegi fejlődésére légvédelem, ez a módszer csökkenti a katonai szállító repülőgépek földi légvédelmi rendszerek tüzéből származó veszteségének valószínűségét, mivel lehetővé teszi a nagy magasságból történő leszállást anélkül, hogy repülőgépek belépnének az ellenséges földi légvédelmi rendszerek működési zónájába.
Az Amerikai Haditengerészet MTR Parancsnoksága azt tervezi, hogy minden felderítő búvár, valamint az RJB-11 típusú, vízre tudó hajók legénységének tagja UPPS segítségével leszállási kiképzésen vesz részt. Utóbbiaknál ez azt jelenti, hogy a csónak közvetlen közelében le tudnak csobbanni és utána gyorsan odaérni. Ennek érdekében állandó nagy magasságú ejtőernyős ugró tanfolyamokat szerveztek a Haditengerészeti Különleges Erők Kiképző Központjában a Coronado Haditengerészeti Bázison, mivel a Yuma interspecifikus magasugró oktatóközpontban a Haditengerészet MTR számára évente kiosztott helyek nem elegendőek a képzéshez. ezen alakulatok szükséges számú katonai állománya. Érdekesség, hogy ebben a központban a kiképzést a GPS World cég szakemberei végzik, amellyel a haditengerészet MTR parancsnoksága megfelelő szerződést kötött, jóváhagyva a programot és a képzési módszertant. Ezen túlmenően ez a cég egy másik szerződés alapján, ugyanazzal a parancsnoksággal, különféle típusú HIPS-eket gyárt és szállít neki.
Az elmúlt évtizedekben megjelent másik tendencia a Különleges Erők katonai egységeinek repülési súlyának növekedése ejtőernyős leszálláskor, amelyet magának az ejtőernyősnek, fegyvereinek és felszereléseinek össztömege határoz meg, vele együtt leszálláskor. valamint az UPSS saját súlya. Például még a Desert Storm hadművelet során is az MTR fegyvereinek és felszereléseinek tömege egyes esetekben elérte a 90 kg-ot.
Jelenleg a megszerzett tapasztalatok és az előttünk álló új kihívások alapján, elsősorban az Egyesült Államokban és Nyugat-Európa egyes országaiban, az ejtőernyős rendszerek és a leszállást segítő eszközök (PS és SD) fejlesztése, valamint a leejtés pontosságának javítása. az emberek és a rakomány a különleges erők érdekében, aktívan fejlesztik. Például az egyik NATO-irányelv (DAT-5-Ref.: AC/259-D(2004)0023 Final) meghatározza a 10 legfontosabb területet a fegyver-, ill. katonai felszerelés harcolni nemzetközi terrorizmus. Az egyik (5. pont) a következő: "Nagy pontosságú PS és SD fejlesztése MTR-hez". E területeken a K+F finanszírozás is növekszik. Például az Egyesült Államok Védelmi Minisztériuma 2005-ben 25 millió dollárt különített el ezekre a célokra, ami majdnem hétszer több, mint 1996-ban.
Ugyanakkor a külföldi szakértők szerint a fejlődés sikerült siklóernyős rakományrendszerek(UPPGS) az SD fejlődésének legígéretesebb iránya. Segítségükkel pontos és rejtett áruszállítás valósítható meg az ellenség által megszállt területeken működő különleges erők egységei számára. Ezekkel a rendszerekkel a különleges erők csoportjainak navigációs segítséget is lehet nyújtani (az UPGS az utána leszálló felderítő csoportok „vezetőjeként” vagy „vezetőjeként” működik az UPPS-en, vagy segítségével világító jelzőfényeket állítanak be a leszállóhelyek, ill. rakomány fogadása éjszaka). Emellett pszichológiai műveletek során is használhatók (propaganda szórólapok és egyéb kampányanyagok szétszórása szigorúan meghatározott területeken). Az ilyen alapokra nemcsak a katonai területen lehet kereslet, hanem a polgári szektorban is, például amikor természeti katasztrófák vagy ember okozta katasztrófák áldozatainak nyújtanak segítséget, nehezen megközelíthető hegyvidéki vagy északi régiókban dolgoznak, amikor nincs más mód a szükséges áruk gyors és pontos eljuttatására, vagy a légi úton történő szállítás sokáig tart.
UPPGS kombinált típus"Ónix" az Atair Aerospace (New York) fejlesztette ki a Natik Research Center és az Egyesült Államok Fegyveres Erői Különleges Műveleti Parancsnoksága kisvállalkozásai K+F finanszírozási programjának részeként. 2005 októberéig több mint 200 repülési tesztet hajtottak végre az UPGS-en.
Az Onyx rendszert legfeljebb 1000 kg repülési tömegű rakományok leszállására tervezték 10 700 m tengerszint feletti magasságból repülőgépekről és helikopterekről telepített görgős szállítószalaggal önleejtő módszerrel (ha a repülőgép pozitív szöggel rendelkezik). támadást és a rakományt gravitáció választja el egymástól), ha a repülőgép jelzősebessége 278 km/h-ig a kijelölt leszállási ponttól legfeljebb 44 km távolságban NANO vagy HALO módszerrel ejtőernyős géppel. Az átlagos négyzetes leszállási hiba a kijelölt ponttól számítva nem haladja meg az 50 m-t.
Az UPGS "Onyx" megkülönböztető jellemzője a két ejtőernyős rendszer használata, amelyek sorozatban működnek a terhelés csökkentésének különböző szakaszaiban: irányított siklóernyős rendszer nagysebességű elliptikus kupolával tervben és irányítatlan ejtőernyős leszállórendszer ejtőernyős tárgy biztonságos leszállására kialakított kerek teherkupolával.
A cég három típusú UPPGS-t fejlesztett ki: "Onyx 500" (repülési súly 34-227 kg), "Onyx 2200" (227-1000 kg) és "Micro Onyx" kisméretű, legfeljebb 9 kg súlyú rakományok leszállására.
Kupola UPGS "Onyx 500" kéthéjú. A kupola fékfelülete 11,15 m2, fesztávja 3,65 m. Az összecsukott ejtőernyős rendszer és az ejtőernyős irányító egység (PCU) tömege 16,34 kg. Az UPGS "Onyx 2200" kéthéjú kupolájának területe 32,5 m2, fesztávja 11,58 m. A leszállórendszer kupolájának területe 204,3 m2 (a Sombrero hullámosító berendezésével felszerelve) típus, Butler gyártmánya). Az ejtőernyős rendszer tömege a BUP-val együtt 45 kg. Mindkét UPGS aerodinamikai minősége 4,5.
Az ejtőernyős rendszert a repülőgép ejtőernyőjének kényszernyitására szolgáló kábelről indítják működésbe. A siklórendszer bevetése kaszkád séma szerint történik: először egy stabilizáló ejtőernyő kerül bevetésre, amely biztosítja a rakomány előre meghatározott magasságra vagy előre meghatározott időn belüli leengedését, majd az automata ejtőernyő kioldása után a fő ernyőt a rendszert üzembe helyezik. Az Onyx rendszer ejtőernyős gépe szabványos elektronikus pirotechnikai biztonsági ejtőernyős szerkezet alapján készül. A fő ejtőernyő ernyőjének feltöltése után a stabilizáló ejtőernyő a fő ejtőernyő tetője felett és mögött helyezkedik el, és nem zavarja annak irányítását leszállás közben.
A tervezési rendszer főkupolája nyitásakor a dinamikus terhelések csökkentésére tervezett hullámosító berendezés a kupola szakaszok fokozatos kitöltését biztosítja: először a központi, majd az oldalsó szakaszokat. A vezérlőegység biztosítja az Oniks UPGS automatikus kivonását a leszállórendszer nyitópontjához a megadott süllyedési pálya mentén (lehetőség van több útvonal fordulópont használatára, meredek spirálban történő leereszkedésre). Az UPGS az elengedést követően a cél felé fordul, és azt tervezve megközelíti, fokozatosan leereszkedve a leszállás kezdőpontjára, amely az adott leszállási pont felett, a terep felett 1370 m magasságban található. Ezután az UPGS egy meredek spirálban kezdi meg az ereszkedést, ami egy 80 m átmérőjű spirált ír le, amely a talajhoz közeledve szűkül. Az átlagos vízszintes siklási sebesség 41 m/s, a függőleges sebesség spirális ereszkedésnél 62 m/s. Adott leszállóhely feletti terep felett 125-175 m magasságban a leszállórendszert egy pilóta csúszda segítségével telepítik, és a rakomány egy kerek kupolán landol. A leszállórendszer aktiválási pontját a BUP fedélzeti digitális számítógép valós időben számítja ki, figyelembe véve a szélsodródást. A BUP, az ejtőernyős gép, valamint a vitorlázó ejtőernyős rendszer (PPS) kupolái a leszállási szakaszban maradnak az összekötő linken, és újra felhasználhatók.
Az "Onyx 2200" UPGS kupoláinak felfüggesztése a rakományra
Dome PPS rendszer „Onyx” kompozit anyagból készül Val vel nulla légáteresztő képesség, az Atair Aerospace fejlesztette ki. Ez egy háromrétegű anyag. A gyártás során egy nagy modulusú megerősített szövetréteget vékony polimer fóliával vonnak be, amelyet impregnálnak és forró nyomással feldolgoznak. Mivel a kompozit szövetet nem a hagyományos szövési módszerrel állítják elő, nem vetemedik, nem hullámosodik, nem vetülődik, és a gyártási folyamatban bármilyen szögben jelen lehet, és kezdetben felveheti a szükséges geometriai formákat. A kompozit szövedékek varrhatók, ultrahangos hegeszthetők vagy kémiailag ragaszthatók.
Az új anyag vékonyabb, 3-szor erősebb, 6-szor kevésbé nyújtható és 68 százalékkal tartósabb. könnyebb, mint a hagyományos duplakeretes, nulla légáteresztő képességű nylon anyagok, amelyeket a mai vezérelt PPS előtetőihez használnak. Az Atair Aerospace kompozit anyagából készült ejtőernyő-tető elülső ellenállása sokkal kisebb. Az ilyen anyagok használata lehetővé tette az Onyx rendszerek fejlesztői számára, hogy csökkentsék a PPS kupola területét, és ennek következtében jelentősen növeljék a terhelést. Ugyanakkor 65 százalék megnövekedett aerodinamikai minőség. Kompozit anyagból készült ejtőernyő-ernyőre nem varrnak nagy szilárdságú szalagból készült megerősítő keretet, mint a hagyományos előtetőkre. Kisebb térfogatú, mint az azonos területű, hagyományos anyagokból, például F-111-ből vagy ZP-ből készült kupolák. A kupola teljesítménytulajdonságai is javultak. Nem szívja fel a nedvességet, nem befolyásolja az ultraibolya és napsugárzás, nem süt össze, és több mint öt évig összehajtva, használatra kész állapotban tárolható.
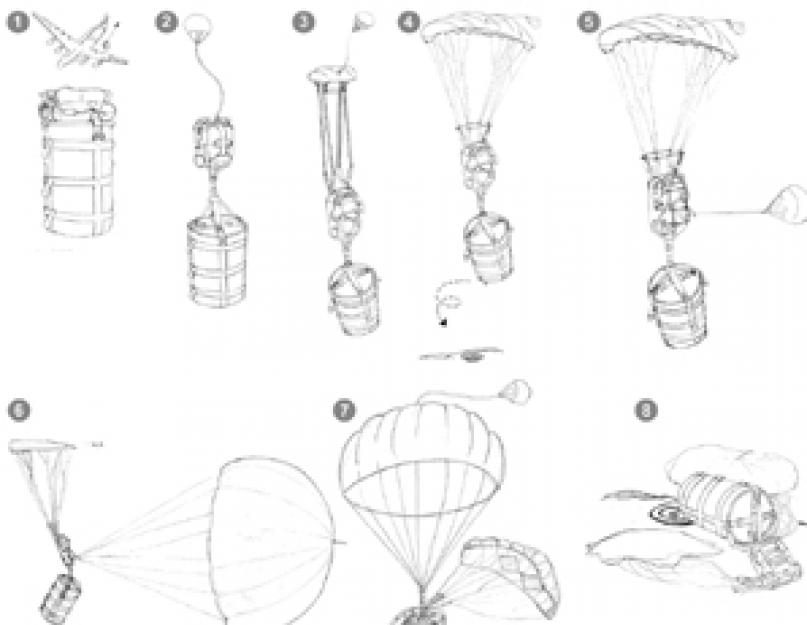
Az UPGS "Onyx" származása:
1 - az UPGS leválasztása a repülőgépről, stabilizáló ejtőernyő bevezetése;
2 - leereszkedés stabilizáló ejtőernyőn; 3 - az UPPGS fő kupolájának megnyitása;
4 - leereszkedés a főkupolára; 5 és 6 - a leszálló ejtőernyős rendszer rakománykupolájának kinyitása; 7- ereszkedés teherejtőernyőn; 8- leszállás
2005-ben a cég 2,5 millió dollárt fektetett be saját tőkéjéből egy új ejtőernyős kompozit anyag gyártására alkalmas létesítmény felépítésére. Azonban a fő hátránya megakadályozza széleskörű használat Ennek az anyagnak a különböző ejtőernyős rendszerek gyártásához jelenleg a költsége: ötször drágább, mint a szabványos anyagok.
UPGS repülésirányító egység Az "Onyx" a következőket tartalmazza: fedélzeti számítógép 32 bites processzorral; űrrádiójelekkel korrigált strapdown inerciális navigációs rendszer (SINS). navigációs rendszer(KRNS) NAVSTAR és pneumatikus teljesítményhajtás a PPS vezérlővonalakhoz. A fedélzeti számítógép a következő adatokat dolgozza fel: vízszintes tartomány a leszállási pontig; barométer magasság; ASG tanfolyam; CRNS segítségével számított magasság; szélsebesség; süllyedési sebesség; alapsebesség; útvonal; alul-/túllövés a cél felé; ferdetávolság a leszállóhelyre; várható leszállási idő. A SINS tartalma: háromkoordinátás giroszkóp, gyorsulásmérő, magnetométer és barometrikus magasságmérő. A 16 csatornás CRNS vevő 4 Hz-es frekvencián frissíti az adatokat, és 2 m-es pontossággal határozza meg a mozgó objektum koordinátáit. A SINS méretei 3,81 x 5,08 x 1,9 cm, súlya 42,5 g ,6 x 12,7 x 5 cm a BINS-szel együtt. A vezérlőegység -50 és +85°C közötti hőmérsékleti tartományban és 17 670 m magasságig működőképes marad, az áramellátást 12 V-os lítium-ion akkumulátor biztosítja, melynek folyamatos működési ideje 6 óra.
Az UPGS repülési feladatát a vállalat szakemberei által létrehozott, az egységes SPPS-sel kompatibilis repülési feladattervező rendszer (SPPS) felhasználásával fejlesztik. Lehetővé teszi, hogy vezeték nélkül beléphessen egy repülési küldetésbe bármilyen típusú UPGS vezérlőegységbe, mielőtt berakodna a repülőgépbe, vagy beléphet a repülési elektronika segítségével. A repülési feladat eltávolítható adathordozóra rögzíthető. Az SPPS segítségével lehetőség nyílik az UPGS összes alkatrészének és mechanizmusának működésének repülés utáni elemzésére.
A vezérlőegység lehetővé teszi az UPGS "Oniks" használatát SPPS használata nélkül, amikor a rakományt közepes magasságból és a leszállási ponttól rövid távolságra ejtik. Csak a rakomány tömege és a leszállási pont koordinátái vannak előre beállítva. Miután az UPGS-t ledobták a repülőgépről, a repülés közbeni PCU valós időben feldolgozza a kapott adatokat, és ezt a rendszert a kijelölt érintési pontra hozza. Különösen 2004 júniusában, az amerikai hadsereg képviselőinek szánt Natik teszttelepen az UPGS demonstratív kibocsátását SPPS használata nélkül hajtották végre. Összesen 10 ejtést hajtottak végre 3000 m magasságból a terep felett és 1,8-5,5 km távolságból a kijelölt leszállóhelytől. A kilökődés kezdőpontját önkényesen választották ki. Az átlagos négyzetes hiba a leszállás során 57 m volt (az adott leszállási ponttól való maximális eltérés 84 m, a minimum 7 m volt).
2004 decemberében az arizonai Eloy vezényelt repülési tesztek adaptív rendszer ejtőernyős navigáció (SMpN) az UPGS "Onyx" sorozatos kiadása során az SMPN információs és vezérlő algoritmusainak kidolgozása az UPGS csoport repülésének vezérlésére a vízszintes és függőleges síkban történő együttes fordulat módokban, valamint az UPGS levegőben való konvergenciáját megakadályozó rendszer. Öt UPGS a kibocsátás után egy zárt csoport vagy alakulat részeként (csapágy, egyetlen PGS folyama) repülést hajtott végre a kijelölt érintési ponthoz. Az UPGS relatív helyzetének, sebességének és gyorsulásainak meghatározására a levegőben egy formációrepülés során, mindegyikre adatvételi és -továbbítási rádióberendezést (RlPD) telepítettek. Az információkat a "tábla-tábla" vonalon továbbították. Ez biztosította az UPGS csoportos repülését addig a pontig, ahol a csoport megkezdte a feloszlást és a manőverezést (nyitást), hogy biztonságos intervallumot teremtsen a leszálló PS megnyitása előtt. A tesztek során három módszert dolgoztak ki az UPGS csoport repülésének irányítására.
Első út az, hogy az egyik rendszert vezetőként ("vezetőként") használja. Ezzel egyidejűleg a névleges pályát követte, és a szolga rendszerek fedélzeti számítógépében információ keletkezett, figyelembe véve a radaron keresztül továbbított vezető rendszer relatív gyorsulásaira, pályaszögére és szögsebességeire vonatkozó adatokat, ill. a többiek a „vezért” követték. Ennek a módszernek azonban az Atair Aerospace szakemberei szerint van egy nagy hátránya: a vezető UPGS meghibásodása vagy a vezérlőegysége működésének rövid távú meghibásodása esetén az összes rendszer feletti irányítás elvesztése következhet be.
Második út "virtuális vezető" alkalmazását jelenti, amikor ugyanazt a programot vezették be az összes UPPGS vezérlőegységébe és végrehajtották a repülést, folyamatosan figyelve egymáshoz viszonyított helyzetüket, betartva a megadott intervallumot és távolságot. Az UPGS-ek közötti információcsere során vezérlőrendszereik az adottnak leginkább megfelelő repülési pályát alakítottak ki, és azt követték. Ezzel a módszerrel a kijelölt "vezető" úgymond hiányzik. Ennek a módszernek az előnye az amerikai szakértők szerint az egyes UPPGS-ek PCU-inak működésének függetlensége. Egy vagy több kilépése a programozott pályáról nem befolyásolja a csoportban maradó rendszerek repülését. Ugyanakkor az SMpN működésének ez a módja egy jól működő és megbízható RLPD-t, egy nagy sebességű processzort és egy komplex szoftver.
A harmadik út decentralizált, a következő. Minden UPGS PCU-jába ugyanaz a repülési program kerül be, azonban az információcsere csak a csoport két vagy három legközelebbi rendszerével történik, amelyek közül az egyik egy másik minicsoport UPGS-jével cseréli. . Ez a vezérlési módszer lehetővé teszi az SMPN számára, hogy sikeresen végrehajtsa az UPGS csoport manőverezését: zárást, nyitást, újjáépítést, hogy megkerülje az akadályokat, eltérjen a különböző leszállóhelyekre vagy feloszlassa a csoportot, mielőtt leszállna valamelyikre, és külföldi szakértők szerint a legígéretesebb.
Az Atair Aerospace szakemberei szerint az általuk kifejlesztett SMPN 5-50 Onyx rendszerből álló csoport repülését és biztonságos leszállását teszi lehetővé 55 km-nél nagyobb távolságra, egy vagy több, egymástól távol eső leszállóhelyen.
2005-ben az Egyesült Államok Különleges Műveleti Parancsnoksága öt Onyx 500 UPGS-t vásárolt próbaüzemre, 2006 szeptemberében pedig 3,2 millió dollár értékű szerződést írtak alá 32 különböző típusú rendszer vásárlására.
Meg kell jegyezni, hogy az Onyxon két egymás után működő alállomás használata számos előnnyel jár az egykupolás alállomásokhoz képest. A PPS használata a leszálláshoz lehetővé tette a fejlesztők számára, hogy a lombkorona sebességi tulajdonságainak javítására összpontosítsanak. Ezenkívül nem volt szükség összetett vezérlő algoritmusokra a rakomány biztonságos leszállásához a PTS-re, ami a szoftver egyszerűsítéséhez és költségének csökkenéséhez vezetett. A nagy vízszintes és függőleges sebességek 10-szeresére csökkentették az UPGS levegőben töltött idejét a kerek ernyős vagy UPGS-es ejtőernyős rendszerekhez képest, amelyek kupolája hagyományos anyagokból készült, azonos magasságból leejtve, és ezáltal a valószínűségét. hogy az ellenség észlelte őket a levegőben. Ugyanakkor ennek a rendszernek a PPS repülési teljesítményjellemzői, amelyek 2-3-szor magasabbak az MTR-rel szolgálatban lévő leszálló PPS repülési taktikai jellemzőinél, nem teszik lehetővé a leszálláshoz való használatát. . személyzet a különleges erők egységei „vezetőként”.
Az amerikai katonai iránymutatások szerint a NANO és a HALO leszállási módszerek azt jelentik, hogy a repülőgéptől való elválasztás legalább 18 000 láb (5486 m) tengerszint feletti magasságban történik. A HALO ejtőernyő a talajszint felett legalább 3500 láb (1066 m) magasságban vetődik. A NANO módszernél az ejtőernyő nyitási késleltetése nem haladhatja meg a 12 másodpercet.
A hozzászóláshoz regisztrálnia kell az oldalon.
Kuyanov A.Yu.
Menedzselt tervező rakományrendszer (UPGS) "Onyx"
UPGS „Onyx” (1. ábra), 34–34 tömegű rakomány leszállására 1000 kg 10,7 km magasságig, korlátozott területekre, éjszaka és rossz látási viszonyok között, teljesen autonóm üzemmódban.
1. kép -UPGS "Onyx"
Az UPGS "Onyx" működési elve a 2. ábrán látható, ahol a következő lépéseket számok jelzik:
1. Elkülönülés LA-tól.
2. Stabilizáló ejtőernyő bevezetése.
3. A fősiklóernyő bemutatása.
4. Az "Onyx" fedélzeti számítógép egy adott leszállóhelyre irányítja az UPGS-t.
5. Leszállási ejtőernyő bevezetése minimális biztonságos magasságban.
6. Rövid távú ereszkedés két ejtőernyővel.
7. Süllyedés a leszálló ejtőernyőn.
8. Lágy és pontos leszállás.

2. ábra– Az UPGS "Onyx" működési elve
Az UPGS "Onyx" előnyei és teljesítményadatai:
- biztosítja a rakomány leszállását 34-től 1000 kg ;
- nagy leszállási pontosság - átlagos pontosság 75 m ;
– üzemi hőmérséklet tartomány -50 és + között 85C ;
- aerodinamikai minőség - 4,5;
- a rendszer moduláris felépítése könnyű használatot biztosít;
- a két ejtőernyős rendszer használatára vonatkozó döntés lehetővé teszi a leszállási idő 10-szeres csökkentését az egykupolás tengelyszimmetrikus ejtőernyős rendszerhez képest;
- a stabilizáló ejtőernyő használata lehetővé teszi a dinamikus terhelések csökkentését a siklóernyő működésbe lépésének pillanatában;
- a tervező és leszálló ejtőernyők újrafelhasználásának lehetősége;
– GPS-hez csatlakoztatott kis számítógép, amely képes repülési adatok rögzítésére;
– megbízható pneumatikus vezérlőhajtások;
– a leszálló ejtőernyő bevezetése a megengedett legkisebb magasságban történik;
- légi ütközést elkerülő rendszer;
- az alapszámítógép lehetővé teszi, hogy a kommunikációs vonalon keresztül valós időben módosítsa a repülési útvonalat;
- a repülési útvonal korrekciója, figyelembe véve a szél erősségének és irányának változásait (ezek az adatok leszállás előtt kerülnek bevitelre);
- a szoftver a leszálló rakomány tömegétől függően korrigálja a szükséges szárnyterhelést és megszünteti a szárny repülés közbeni aszimmetriáját.
Az Onyx UPGS fejlesztői megjegyzik, hogy a két egymás után működő ejtőernyős rendszer használata számos előnnyel jár az egykupolás rendszerekhez képest. A leszálló ejtőernyős rendszer használata a leszálláshoz lehetővé tette a fejlesztők számára, hogy a lombkorona sebességi tulajdonságainak javítására összpontosítsanak. Ezen túlmenően megszűnt a rakomány biztonságos leszállásához a leszálló ejtőernyős rendszer komplex vezérlőalgoritmusai iránti igény, ami a szoftver egyszerűsítéséhez és költségeinek csökkentéséhez vezetett. A nagy vízszintes és függőleges sebesség 10-szer csökkentette az UPGS levegőben töltött idejét a tengelyszimmetrikus ernyővel rendelkező ejtőernyős rendszerekhez képest, így csökkentve annak valószínűségét, hogy az ellenség észlelje az UPGS-t a levegőben. Ugyanakkor ennek a rendszernek az UPGS-einek repülési teljesítményjellemzői 2-3-szor magasabbak, mint a „szárny” típusú kétéltű ejtőernyős rendszerek repülési teljesítményjellemzői, amelyek a különleges hadműveleti erőkkel szolgálnak. használatát nem engedélyezi. mint "vezető" a különleges erők egységek állományának leszállása során.
És mégis, a kerek leszálló ejtőernyő használata csökkenti a megbízhatóság és a hibamentes működés mutatóit, növeli a súly- és méretmutatókat, bonyolítja a teljes Onyx UPGS működését.
Talán ez a döntés elsősorban annak tudható be, hogy az Onyx UPGS fejlesztői nem tudják (nehézségből) megvalósítani a dinamikus fékezést vagy az aerodinamikus detonációt.
Jelenleg az UPGS-t fejlesztették ki, amelyben a DT elvét valósítják meg a PS adott leszállási sebességének eléréséhez.
Irodalom
1 http://www.extremfly.com.
2 S. Prokofjev "Onyx" amerikai ejtőernyős rendszer - külföldi katonai szemle №5 2007.
A rendszer biztosítja a berendezés visszatérését egy adott pontra, és kiküszöböli az ember közvetlen részvételét az emberre veszélyes területek diagnosztizálásában. A rendszer többféleképpen használható időjárási viszonyokés a nap különböző szakaszaiban, többször is. A rendszer tartalmaz egy sikló ejtőernyőt rakodó platformmal, egy jeladó érzékelő egységet, egy parancsnoki egységet, egy ejtőernyősor vezérlő egységet, egy inerciális navigációs rendszert, egy egységet a be- (ki) és beállításhoz szükséges vezérlőjelek generálására. kezdeti feltételek inerciális navigációs rendszerhez és blokkhoz a Föld felszínének területének diagnosztizálására. 9 ill.
A találmány repüléstechnikára vonatkozik, különös tekintettel a különféle célokra használható irányított ejtőernyős rendszerekre: áruk szállítására nehezen elérhető területekre, természeti katasztrófák, balesetek helyére, diagnosztikára és felderítésre. különböző kerületek stb. A környezeti katasztrófák, például a csernobili katasztrófa, az erdők és mezők, a tundra és a tajga katonai tevékenységből származó hulladékkal és olajjal való szennyeződésének növekedésével a különböző területek pontos diagnosztizálásának és feltárásának a feladata. a Föld felszíne hozzáférhetetlenség és/vagy káros hatások miatt emberi beavatkozás nélkül. A mérő- és diagnosztikai berendezések helikopterrel történő szállításának ismert eszközei, amelyek hátránya, hogy egy személy veszélyes helyzetbe kerül (radioaktív sugárzás stb.). A berendezések szondákkal és rakétákkal történő szállításának ismert módjai, az ilyen rendszerek hátránya, hogy telemetriára vagy visszatérő egységekre van szükség, ami nehezen elérhető helyeken nehezen kivitelezhető. Ezeket a feladatokat irányított ejtőernyős rendszerrel lehet megoldani. Ismert siklóernyős rendszer hasznos teher szállítására (US szabadalom N 4865274, Class B 64 D 17/34, Appl. 29.04.88 - prototípus), amely szárny formájú ejtőernyőt, vezérlőegységet tartalmaz az ejtőernyős vonalak megváltoztatásához a szárny állapota és a repülési útvonal . Ez a kialakítás nem biztosítja a rakomány pontos szállítását. Ismeretes a szabályozott ejtőernyős rendszer különféle rakományok kiszállítására természeti katasztrófák, balesetek stb. nehezen elérhető területeire (RF szabadalom N 2039680, Class B 64 D 17/34, dec. 08.06.93), amely siklót tartalmaz ejtőernyő, felfüggesztési rendszer, rakományplatform és ejtőernyős vonalvezérlő konténer. A vezérlést a parancsblokk végzi a megadott működési program szerint úgy, hogy a rakomány leszállási helyén található jeladóval kapcsolatos információk elemzése alapján vezérlési túlterheléseket hoz létre a vonalak meghúzásával. Az információelemzést a rakományplatformon elhelyezett, a parancsnoki egységhez csatlakoztatott jeladó-érzékelő egység végzi, amelynek egyik kimenete az ejtőernyős vonalak vezérlőegységéhez, a másik pedig a jeladó-érzékelő egységhez való visszacsatolás útján történik. Attól függően, hogy az egyik vagy másik típusú jelzőfény elérhető-e a leszállóhelyen, egy megfelelő típusú érzékelőt telepítenek a platformra, moduláris változatban. Különböző fizikai elven működő vagy termikus kontraszton működő, vagy kombinált beacon szenzorok használhatók. A jelzőfények észlelése történhet passzív érzékelési eszközökkel, aktív (jelek kibocsátására és vételére szolgáló rendszerek használatával) vagy félaktív eszközökkel (jelzőfény megvilágítással). Ez a kialakítás azonban, mint más jól ismert rendszerek, nem teszi lehetővé az autonóm felderítés és diagnosztika problémáinak megoldását a platform adott pontra való visszatérésével a felszereléssel. A problémát a javasolt vezérelt ejtőernyős rendszer segítségével oldják meg, amely a kívánt helyen elhelyezett jelzőt célozza meg, és rendelkezik "szárnyas" típusú siklóernyővel, rakodóplatformmal, sorba kapcsolt jeladó érzékelő egységgel, parancsnoksággal. egység, melynek második kimenete a jeladó-érzékelő egység és az egység ejtőernyős vonalak vezérlésének bemenetére csatlakozik. A vezérelt ejtőernyős rendszer ezenkívül tartalmaz egy sorba kapcsolt inerciális navigációs rendszert, melynek második kimenete a parancsblokk második bemenetére csatlakozik, egy blokkot a ki/bekapcsoláshoz vezérlőjelek generálására és az inerciális navigáció kezdeti feltételeinek beállítására. rendszer, amelynek második kimenete az inerciális navigációs rendszer bemenetére, a harmadik kimenete a jelzőfény érzékelő egység második bemenetére és a második kimenetére, valamint a Föld felszíni diagnosztikai egységére csatlakozik. terület. A PS repülése egy adott pálya mentén az aerodinamikai paraméterek megváltoztatásával történik az inerciális navigációs rendszer parancsaira, a PS fordított irányra fordulása és a világítótorony területén történő leszállás pedig a változtatással történik. az ejtőernyő aerodinamikai paramétereit a hevedervezérlő egység és a leszállási területen kereső jeladó-érzékelő egység parancsai szerint. A földfelszín egy adott pontjára való visszatéréssel rendelkező ejtőernyős rendszer használata lehetővé teszi a rakomány leszállásának pontosságát 5-60 m-en belül, a használati feltételektől függően, csökkentve az emberi szervezetre gyakorolt káros hatások kockázatát, és a rendszert különféle időjárási körülmények között és a nap különböző szakaszaiban ismételten és alacsony költséggel használja. Így a vezérelt rendszer új szerkezeti megvalósítása, valamint a rendszer blokkjai között nem nyilvánvaló kapcsolatok jelenléte, amely lehetővé teszi egy adott pontra visszatérő terület diagnosztizálásának feladatát. a föld felszínét a szükséges pontossággal. Az 1. Az 1. ábra a rendszer blokkvázlatát mutatja; ábrán. a 2. ábra az IR tartományhoz tartozó beacon érzékelő egység blokkvázlata; ábrán. 3 - a parancsblokk blokkvázlata; ábrán. a 4. ábra az ejtőernyős vonalak vezérlőtartályának blokkvázlata; ábrán. 5 - az inerciális navigációs rendszer blokkvázlata; ábrán. A 6-9. ábrák az inerciális navigációs rendszer be- és kikapcsolásához és a kezdeti feltételek beállításához szükséges vezérlőjelek generálására szolgáló blokk működésének blokkvázlata. A Föld felszínének egy adott területének diagnosztizálására szolgáló irányított ejtőernyős rendszer (PS) tartalmaz egy siklóernyőt 1 rakodóplatformmal, egy 2 jeladó-érzékelő egységet, egy 3 parancsnoki egységet, egy 4. ejtőernyős vonalvezérlő egységet (vezérlő konténer) csatlakoztatva sorba kapcsolt, és sorba kapcsolt 5. inerciális navigációs rendszer, 6. egység - vezérlőjeleket generál a be-/kikapcsoláshoz és a kezdeti feltételek beállításához az inerciális navigációs rendszer és a 7. Föld felszíni diagnosztikai egység számára, míg a második kimenet a 3 vezérlőegység a 2 jeladó érzékelő egység bemenetére, az 5 inerciális navigációs rendszer második kimenete a 3 parancsblokk második bemenetére, a 6 blokk második kimenete a 2 jeladó bemenetére csatlakozik. Az 5 inerciális navigációs rendszer és a 6 blokk harmadik kimenete és második bemenete a 2 jeladó-érzékelő egység második bemenetéhez és második kimenetéhez van csatlakoztatva. A rendszer egy soros vezérlésű ejtőernyőt használ szárny formájában, például UPG-0.1 vagy PO-300, valamint egy soros platformot a Föld felszíni területére vonatkozó diagnosztikai egység elhelyezésére, valamint egy jeladó érzékelő egységet, amely ütéscsillapítóval rendelkezik. a leszállási hatások mérséklésére szolgáló elemek. A rendszerben rejlő funkciók megvalósítása
A) a Föld felszíni terület 7 diagnosztikai egységének és a 2 jeladó érzékelő egységnek a vezérlése a repülés időciklogramjának és a kezdeti feltételeknek megfelelően;
B) az 5 inerciális navigációs rendszer vezérlése;
C) az 5 inerciális navigációs rendszer kimenetéből származó információk feldolgozása
Használható a 6. blokk, amely vezérlőjeleket generál be/ki, és beállítja az inerciális navigációs rendszer (fedélzeti számítógép) kezdeti feltételeit. Egy ilyen blokk előnye, hogy a fedélzeti program újrakonfigurálható bármilyen típusú IBM - 286, 386, 486-ból, amelyben a PS időszekvencia diagramja programként van megírva magas szintű nyelven. Az inerciális navigációs rendszer be-/kikapcsolásához és kezdeti feltételeinek beállításához szükséges vezérlőjelek generálására szolgáló blokk soros elemeken alapul, például 1830 BE31. A Föld felszínének 7 diagnosztikai egysége a feladattól függően tartalmazhat sugárzást mérő szenzorokat (radar, optikai ...), kamerát, hőmérsékletet, légköri szennyezést (látható és infravörös tartományban) stb. . Az 5 inerciális navigációs rendszer tartalmaz egy blokkot a 8 kompenzációs nyomatékok generálására, egy blokkot 9 inerciális elemekből, egy 10 számítástechnikai eszközt, és a 2. ábra szerint készíthető. 5. Beacon érzékelő egység 2 - a hullámhossz tartományoktól függően eltérő, az IR tartományokhoz tartalmazhat egy infravörös jeladót, amely giroszkóp elektronikus egységgel és letapogató áramkörrel, pumpáló mechanizmussal, nyomkövető giroszkóp forgórész gyorsító egységgel , vagy olyan rádiórendszer, amely egy rádióadót (jeladót) és egy szuperheterodin áramkör szerint készült rádióállomás vevőjét tartalmazza egy frekvenciaátalakítással (például P-855 A1 soros rádióállomás). A vizsgált tárgy (tűz) sugárzását a lencse egy üvegkorongraszterre fókuszálja, váltakozó átlátszó és átlátszatlan szektorokkal. Ebben az esetben a szektorpárok száma a szélétől a közepéig 6-ról 12 darabra nő. A raszter a lencse optikai tengelyéhez képest középen helyezkedik el, és az utóbbival együtt van felszerelve a giroszkóp forgórészére. Ez utóbbi kardán felfüggesztésén egy fotodetektor található, amely és a raszter közé fényvezető van beépítve. A giroszkóp forgórésze egy állandó kétpólusú mágnes, melynek fp frekvenciáját állandó elektromágneses rendszer tartja fenn. A fotodetektorból származó jel áthalad egy pólusszűrőn, amelynek rezonanciafrekvenciája fres = 12 fp, érzékeli, egy teljesítményerősítő felerősíti, és belép a korrekciós tekercsbe. A korrekciós tekercs és a forgó állandó mágnes mágneses mezőinek kölcsönhatása során mechanikai nyomaték keletkezik, melynek hatására a giroszkóp a kívánt irányban precessál, a sugárforrást a látómezőben tartva. A beállított követési módban a korrekciós áram arányos a látóvonal szögsebességével. Az áramból vezérlőparancs keletkezik, amely megfelel az irányzás szögsebességének. A giroszkóp forgórészéhez és az egység testéhez kapcsolódó mozgatható és rögzített referenciarendszerek közötti kapcsolat a referenciajel-generátor (GON) érzékelő tekercseivel és a jelzőfény-érzékelő egység optikai tengelyével jön létre. A GON tekercsek hossztengelyei merőlegesek a ház hossztengelyére. A 2 érzékelő egység jeladójának pumpáló mechanizmusa a PS pályáján, a dőlésszög és a dőlésszög elérheti a +50 o értéket. A giroszkóp szervo rotorjának szivattyúzási szöge 40 o . Emiatt szükségessé válik a jeladó érzékelő egységet a PS pályájára fordítani, amikor a nyomkövető giroszkóp megközelíti a konstruktív megállóhelyet, és az objektum (tűz) automatikus követése meghiúsulhat. A dovorot biztosítja a stop kihúzását a nyomkövető giroszkópból. A pumpáló mechanizmus a termék két részre forgatását biztosítja merőleges síkok a GON-0 o és GON-90 o tekercseken átmenő tengelyek és a jeladó érzékelő egység középpontja körül annak keresztmetszetében. A GON tekercshez tartozó tengelyek körüli forgatás biztosítja a kapcsolódó koordinátarendszer fenntartását. A letapogató áramkör a giroszkóp forgórészének vezérlését biztosítja a korrekciós tekercseken keresztül egy adott törvény szerint. Az érzékelőben beállítják az információs jel küszöbértékeit, és parancs generálódik a pásztázás kikapcsolására, a nyomkövető giroszkóp dezorientálására és egy objektum (például tábortűz) automatikus követésének elindítására. A 2 jeladó érzékelő egység egyik kiviteli alakjának példája a 2. ábrán látható. 2. A beacon szenzor a látóvonal szögsebességével arányos vezérlőjelet állít elő, melynek értékét az IR csatorna jelei, illetve rádiójelek alapján számítja ki 2 egymásra merőleges síkban. A 3. parancsblokk szabványos elemeket tartalmaz - fáziscsapágy detektort, csapágyjel különbség kalkulátort, csapágy nulla számlálót, korrekciós kapcsolót, vezérlőparancsot generáló berendezést, és mikroprocesszor alapján készülhet. A 3. blokk egyik kiviteli alakjára egy példa látható az 1. ábrán. 3. Az ejtőernyős vonalak 4 vezérlőegységének (vezérlő konténer) blokkvázlata a 3. ábrán látható. 4. A repülőgép irányításának és repülési pályára történő indításának, valamint a kiindulási pontra való visszatérésének folyamata a következő szakaszokban ábrázolható: a repülőgép programrepülésének szakasza adott repülési feladat szerint; a PS megfordításának szakasza a fordított pályán; a leszálló jelzőfény területére való visszavonulás és a PS leszállás szakasza. A találmány a következőképpen valósítható meg:
A repülőgép repülése előtt a 6-os blokkba a PS inerciális navigációs rendszerének ki/bekapcsolásához és a kezdeti feltételek beállításához szükséges vezérlőjelek generálására kerül sor a billentyűzet segítségével a repülési útvonal paramétereit reprezentáló repülési feladattal, a a diagnosztikai terület feletti repülési magasság és a repülés időciklogramja. A repülés időbeli sorrendje a repülési körülményektől függően tartalmazza a repülési körülményektől függően a Föld felszíni 7 diagnosztikai egysége működésének kezdetének és befejezésének időpontját vagy tartományát, a jelzőfény bekapcsolásának időpontját. 2. észlelési egység (ha szükséges), hogy kiemelje a diagnosztizált zónát a Föld felszínén. A pilóta a repülőgépet (helikoptert) egy adott területre viszi és az ejtőernyős rendszert a raktérrel együtt a hordozó rakománynyílásán keresztül bármilyen ismert módszerrel, például szállítószalag segítségével kilöki. A visszaállítás pillanatában megkezdődik a PS repülési idejének kezdetének visszaszámlálása. A PS stabilizálása után megkezdődik a repülési mód a programozott pálya mentén, az 5 inerciális navigációs rendszer segítségével. A 9 inerciaelemek blokkjából érkező jeleket, beleértve a gyorsulásmérőket és a szögsebesség giroszkópos érzékelőit, a 10 számítástechnikai eszköz dolgozza fel, és írja be a blokkot a kompenzációs momentumok generálására 8. Az 5. blokk inerciális navigációs rendszerből érkező jelek a 3. parancsblokkba kerülnek. A 3. parancsblokkban olyan jelek generálódnak, amelyek belépnek a 4. ejtőernyővonalak vezérlőegységébe, hogy meghúzzák a vezérlővezetékeket ( balra, jobbra) az ejtőernyőről. Az ejtőernyő aerodinamikai jellemzőinek megváltoztatása a PS pályájának paramétereinek megváltozásához vezet, amelyet azonnal rögzítenek a 9 inerciaelemek blokkjában gyorsulásmérők segítségével. A 10. blokkban található 9. blokk információi szerint a repülési távolság és sebesség kiszámítása történik, amelyek a 6. blokkban rögzítettek a be- és kikapcsoláshoz szükséges vezérlőjelek generálásához és az inerciális navigációs rendszer kezdeti feltételeinek beállításához a repülés függvényében. az idő nulla pillanattól számítva. A repülési feladathoz szükséges idő vagy hatótáv elérésekor a 6-os egység parancsot küld a Föld 7-es felszínére vonatkozó diagnosztikai egység bekapcsolására. 6. egység vezérlőjelek generálására az inerciális navigációs rendszer be-/kikapcsolásához és a kezdeti feltételek beállításához, vagy a 2 jeladó-érzékelő egységből, ha az ellenőrzési területen (égő erdő stb.) kifejezett jeladó van. A Földfelszín 7 blokkdiagnosztikájának felvételi módját a repülés időciklogramja határozza meg, amelyet a PS minden egyes konkrét alkalmazására állítanak össze. A megadott idő vezérlése a 6. blokkban programozottan történik. A megadott távolságszabályozás az 5 inerciális navigációs rendszertől kapott információk alapján történik a PS gyorsítás kettős integrálása miatt. A 7 Földfelszín területére vonatkozó diagnosztikai egység rögzítő, mérő és fényképező műszereinek működésének befejezése is a fedélzeti számítógépről 6 történik. A fedélzeti számítógépről 6 történik. A Föld felszínén a PS a 4. ejtőernyős vonalak vezérlőegységéhez továbbított zsinórvezérlési parancs hatására fordított irányt kezd kapcsolni, amikor ez letiltja az 5 inerciális navigációs rendszert és a szögsebesség szabályozását. a látóvonalat, és elkezd PS 180 o -kal fordulni. A 180°-os kanyar befejezése után bekapcsol az 5 inerciális navigációs rendszer, amelyből az információ a 3 vezérlőegységhez kerül, hogy a hevederek számára megfelelő vezérlőjelet generáljon. A PS visszatérése a jeladó helyének meghatározott területére (leszállás) a PS programrepülése miatt történik az 5 inerciális navigációs rendszer parancsai szerint, és a kezdeti feltételek bekerülnek az inerciális navigációs rendszerbe. a 6. blokk memóriájából. A 6. blokkból a leszállási pont adott időpontban történő repülésének kiküszöbölésére a jelzőfényt megkereső 2 jeladó észlelő egység bekapcsolására vonatkozó parancsot kapunk. Amikor a jeladó (IR, MM, kombinált) jele megjelenik, az 5 inerciális navigációs rendszert leválasztják a PS vezérléséről, és készenléti üzemmódba kapcsolnak. A hamis jeladók rögzítésének kizárása érdekében az ejtőernyős rendszernek megfelelő megközelítési vezérlő algoritmussal kell rendelkeznie a jelzőfény számára, például kettős áthaladást biztosítva a jelzőfény felett, kombinált jelzőfény-észlelő egységet szervezve, amelynek jelenléte drámaian növelheti a jelzőfény zajvédelmét. érzékelő. A jeladó azonosításakor a PS a jeladó felé fordul. A fordulási pillanatot a hozzá tartozó koordinátarendszerben lévő irányjel nagysága határozza meg. A világítótorony felé kanyarodás befejeztével kezdődik a világítótoronyhoz vezető útszakasz. A vezérlést a PS korrekciós jel két komponense végzi. Az MS sebességvektor mindig a jeladó látóvonala mentén irányul. A világítótorony hamis befogásának kizárásához az ejtőernyős rendszernek kétszer kell áthaladnia a világítótorony felett. Abban a pillanatban, amikor a rendszer áthalad a jelzőfény felett, első alkalommal lép működésbe a csapágyszámláló, amelynek jelére a 3. parancsblokkban vonalvezérlési parancs generálódik, amely a 4. ejtőernyős vonalak vezérlőegységére kerül. ugyanakkor a látóvonal szögsebessége általi vezérlés kikapcsol, és a PS elkezd a jeladóról 360 o-ra fordulni. A 360 fokos kanyar befejezése után a PS egy pályán repül a világítótorony felé egészen az objektum feletti második áthaladás pillanatáig. A világítótorony feletti második út csapágyszámlálójának rögzítésének pillanatában mindkét vezérlővezeték meghúzásra kerül, hogy felgyorsítsa a rendszer süllyedését és elérje a megadott irányszöget, ami optimális a világítótoronyhoz való tervezéshez. Ezt követően van egy kanyar a világítótorony felé, amit a fentiek szerint hajtanak végre. Ha a jeladót nem rögzítik, az 5 inerciális navigációs rendszertől származó információkat a 6. blokkban elemzik, hogy vezérlőjeleket generáljanak az inerciális navigációs rendszer be- és kikapcsolásához, valamint a kezdeti feltételek beállításához, és az elemzéstől függően vagy parancsot adnak. egy programpontra mutatnak a Föld felszínén, vagy parancsot adnak a PS repülésének folytatására a program pályája mentén. A Föld felszínén található programpont egy pszeudo-beacon, amelynek koordinátáit egy inerciális navigációs rendszer információi alapján alakítják ki.
KÖVETELÉS
Irányított ejtőernyős rendszer, amely egy rakományplatformos siklóernyőt, egy sorba kapcsolt jeladó érzékelő egységet, egy parancsnoki egységet, amelynek második kimenete a jeladó érzékelő egység bemenetére csatlakozik, és egy ejtőernyősor vezérlő egységet tartalmaz, azzal jellemezve, hogy emellett sorba kapcsolt inerciális navigációs rendszert tartalmaz, a második, amelynek kimenete a parancsblokk második bemenetére csatlakozik, a blokk a vezérlőjelek generálására a be-/kikapcsoláshoz és az inerciális navigációs rendszer kezdeti feltételeinek beállításához, a második amelynek kimenete az inerciális navigációs rendszer bemenetéhez csatlakozik, a harmadik kimenet és a második bemenet a második bemenettel és a második kimenettel egy jeladó blokkfelismerésének, valamint egy blokk a jelzőterület diagnosztizálására. A Föld felszíne.A különleges műveleti erők korlátozott területekre történő telepítésének képessége felbecsülhetetlen, különösen akkor, ha ezek a területek nagy magasságban vannak, vagy ha harci kutyák vesznek részt a műveletben.
Az állami struktúrák jobban támaszkodnak a különleges hadműveleti erők (SOF) erői és eszközei felépítésének hatására, valamint azon képességükre, hogy titkosan beszivárogjanak és elhagyják a műveleti területeket. Az MTR által használt modern technikai eszközök egy része különböző országok A légtérben olyan új, fejlett rendszerekre épülnek, amelyek képesek pontosan eljuttatni az üzemeltetők csoportjait nehezen megközelíthető területekre, beleértve a meredek lejtőkkel rendelkező nagy magasságú terepet is.
Ezek a specifikus eszközök lehetővé teszik mind a kicsi, mind a nagy csoportok ejtőernyősök formájában rejtetten megérkeznek a célterületekre, hogy különféle harci feladatokat hajtsanak végre, a megfigyeléstől és felderítéstől a közvetlen harcig, valamint a katonai segítségnyújtásig. Mára a feladatok köre jelentősen bővült a humanitárius segítségnyújtási forgatókönyvekkel és a katasztrófa-elhárítási műveletekkel.
A kor kihívásainak való megfelelés érdekében bátran kell használni az új modellek ejtőernyőit. modern anyagok emberek és rakományok lerakásához, valamint további létesítmények és felszerelések nagy magasságban végzett műveletekhez, például oxigénellátáshoz és speciális felszerelések, köztük kutyák ledobásához.
Röviddel azután, hogy bemutatta siklóernyős rendszerét egy önfelfújó kagylóval RA-1 Az Egyesült Államok Különleges Műveleti Erői Parancsnokságának (USSOCOM) szállított mennyiségben nem közölt, az Airborne Systems North America bejelentette, hogy újabb taggal bővült siklóernyős családja.
Ez a legújabb rendszer, kijelölt Szia-5. A nagy magasságból történő hosszú és rövid ejtőernyős ugráshoz a mai működési igények kielégítésére fejlesztették ki.
A cég szóvivője kifejtette, hogy a Hi-5 rendszer "egyedülálló képességeket biztosít a katonaság számára, és nemcsak kiváló hosszú távú siklásra képes, hanem lehetővé teszi a siklásszög megváltoztatását is a gyors leszállás és a pontos leszállás érdekében".
 Az amerikai különleges erőket távolugrásra képezik ki nappal, rejtett leszállás gyakorlása a célterületeken
Az amerikai különleges erőket távolugrásra képezik ki nappal, rejtett leszállás gyakorlása a célterületeken
A tervezés ereje
A korábbi ejtőernyős rendszerek gyakran speciális megoldások voltak, amelyekkel akár rejtett, nagy hatótávolságú, nagy magasságból történő leszállást, akár vízre való leszállást, akár nyílt ugrásokat alacsony magasságból lehetett végrehajtani, amelyek alkalmasabbak a hagyományos alakulatok vagy a különleges erők nagy ejtőernyőseire.
Az Airborne Systems North America szerint ejtőernyős rendszer Hi-5 5,5:1 emelő-ellenállás aránya (összehasonlítva a jelenlegi vitorlázógépekkel, amelyek emelési-ellenállási aránya 3:1 és 4:1 között változik), és további képességgel rendelkezik, hogy gyorsan átváltson 1:1 légszárny arányra (siklás) arány) a Glide Modulation System vezérli. (aerodinamikai minőség – az emelés/ellenállás aránya)
« Ellentétben az ereszkedési szög szabályozásának más módszereivel, például a trimmekkel, a Glide Modulation System nem növeli az ejtőernyő általános sebességét, így biztonságos átmenetet biztosít bármely magasságban. Ezzel szükségtelenné válik sok spirál vagy szerpentin manőver kis magasságban, és nagyon precíz leszállást tesz lehetővé a biztonságos egyenes megközelítésnek köszönhetően."- mondta a cég képviselője.
„Az ejtőernyős teljesen uralja pozícióját és a célterületre való leszállás pillanatát. A relatív tervezési tartomány technológiájában elért minőségi áttörés mellett a Hi-5 rendszer számos pozitív tulajdonsággal is rendelkezik. Egy ejtőernyős számára könnyen karbantartható és könnyen kezelhető, egy ejtőernyős rakodó esetében a felrakás folyamata intuitív. Áthidalja az Intruder RA-1 és a Hi-Glide ejtőernyőink közötti szakadékot, kiváló aerodinamikai minőségű szárnyat biztosítva a precíziós leszállásokhoz és a nehezen elérhető helyekre való biztonságos leereszkedéshez.”
 Az Airborne Systems North America által kifejlesztett Hi-5 ejtőernyős rendszer
Az Airborne Systems North America által kifejlesztett Hi-5 ejtőernyős rendszer
Kialakítása az ejtőernyő elülső vonalaiba épített további kapcsolókon alapul, amelyek lehetővé teszik az ejtőernyős számára, hogy simábban tudja változtatni a tető aerodinamikai minőségét 5,5:1-ről 1:1-re (például ha 5,5:1, akkor minden 100 méter magasságvesztés, a maximális siklási távolság nulla szél mellett 550 méter). A cég tájékoztatása szerint az ejtőernyős rendszer tartalék tetővel rendelkezik, és szinte csendes működést biztosít a titkos műveletek során.
A Hi-5 rendszer egy 11 szegmenses elliptikus siklóernyőt tartalmaz, amely felhelyezhető maximális magasság 7600 méterrel a tengerszint felett. Az ejtőernyőnek azonban legalább 1050 méterrel a tengerszint felett ki kell nyílnia. Ejtőernyő, nyitható különböző utak a rögzítőkötéltől vagy a rugós kidobású pilóta csúszdától a manuálisan kihelyezett rendszerekig.
A Hi-5 rendszer 2016 októberi bevezetése óta azonban az Airborne Systems North America kifejlesztett egy tetővel ellátott Hi-5 ejtőernyőt. nagyobb méretű, területét 34 m 2 -ről 39 m 2 -re növelték annak érdekében, hogy a teherbírás 220-ról 250 kg-ra növekedjen.
„Ez lehetővé teszi számunkra, hogy beilleszkedjünk a tandemugrás súlytartományába, amit korábban soha nem vettünk figyelembe” – magyarázta a cég vezető technológusa.
„A 39 m2-es kupola lehetőséget kínál arra, hogy a kívánt módon csússzon, vagy pontosan úgy landoljon, ahogy akarja, miközben egy második személyt vagy extra felszerelést is szállíthat. Bővülnek a korszerű katonával szemben támasztott hadműveleti követelmények, katonáinknak több felszerelést kell magukkal vinniük, nagyobb távolságokat kell megtenniük, szűk helyeken pontosan és biztonságosan leszállniuk. A Hi-5 mindezeknek a követelményeknek megfelel, és a 39 m2-es kupola az egyetlen út előre.”
2016 végén amerikai hadsereg bejelentette előlegvásárlási szándékát RA-1 ejtőernyős rendszer Advanced Ram Air Ejtőernyős Rendszer (az alábbi fotó), amelyet hosszú és rövid ugrásra (kötéllel) képesített ejtőernyősök használhatnak 10 000 méteres magasságból történő ugráshoz. Fel kell váltania a meglévő MS-4 Ram Air Personnel Parachute ejtőernyős rendszereket.
 Magasság meghódítása
Magasság meghódítása
A speciális műveletek piacán a Complete Parachute Solutions (CPS) kiemelkedő szerepet játszik a nagy magasságú ugrástechnika fejlesztésében. John Bast, a CPS szóvivője szerint cége bővíti képességeit, többek között a 2013-ban, 2014-ben, 2015-ben és 2016-ban szponzorált Mount Everest-expedíciók keretében, amelyek célja, hogy nagy magasságban teszteljék az ország új követelményeit. modern működési tér.
Bast kifejtette, hogy a CPS Everest csapata nemrégiben tért vissza a Himalájából "új nagy magasságban leszállási rekordokkal" és az új többcélú taktikai oxigénrendszer érvényesítésével. Helikopteres ugrások sorozatát követően a CPS csapata azt állította, hogy a könnyű kezelhetőség, a nagy magasság, a pontosság és a hasznos teher tekintetében további 4 világrekorddal tért vissza erről a küldetésről.
A kezdeti ugrásokat a nepáli Syanbosh repülőtérről felszálló helikopterekről hajtották végre. Az USSOCOM ejtőernyősei, különösen a haditengerészet különleges erőinek és az amerikai tengerészgyalogság különleges erőinek képviselői körülbelül 3800 méteres tengerszint feletti magasságból ugrottak, és a süllyedés során erős széllel, alacsony hőmérséklettel és oxigénhiánnyal küszködtek. , amikor a hipoxia komoly problémává válik. A hipoxia elleni küzdelemben a CPS a Top Out Aero új generációs MTOS-ára (Multi-Purpose Tactical Oxygen System) támaszkodott, amely lehetővé teszi a kezelők számára, hogy „extrém magasságokban” szabadon lélegezzenek.
Az MTOS-t azonban nem csak ejtőernyős ugrások során használták, ezt a rendszert felderítő küldetésekben is alkalmazták felvidéken, leszállóhelyek előkészítésében és egyéb, nagyon nehéz terepen történő magaslati feladatoknál.
A CPS által megdöntött világrekordok közé tartozik, hogy egy 50-nél kevesebb ugrással rendelkező ejtőernyős először landolt 3800 méter magasan, akit speciális küldetések végrehajtására képeztek ki nagy magasságban. Bast szerint Kaylee Wojcik oktató és a tengerészgyalogság korábbi mesterlövésze lett az első "legkisebb ugró, aki sikeresen landolt erős szélben és ritka levegőben, ami jellemző 3800 méternél. Ez egy komoly próbája az agresszív lombkorona-szabályozásnak a CPS által biztosított különleges küldetések és leszállási előkészítő programok során.”
A magassági rekordokat tekintve a CPS oktatói 4500 méteren teljesítették az ugró-leszállási programot Ama Dalammal. Ugyanitt a tengerészgyalogság tartalékos kapitánya, Caroll kapitány 32 kg-os hátizsákkal sikeresen teljesített egy magasba ugrást. A csoport ezután Gorak Shepbe költözött, ahol közel 5200 méteres magasságban hajtott végre leszállást, valamint a Kala Pattar-hegyre, ahol több mint 5300 méteres magasságban történő leszállással ugrottak.
Végül új rekordok dőltek meg tandem ugrások és leszállások terén is 5100 méteren, a TP460 és a Special Operation Vector 3 Tandem Sigma ejtőernyők használatával. Hasonló koncepcióval lehet távolugrásban nem képzett személyzetet bevinni a működési területre, ahol folytathatják speciális feladatukat.
 Az ejtőernyős csoportok felszabadítását gyakran kíséri a taktikai járműveket, gyorshajókat és egyéb speciális felszereléseket a földre szállító teherplatformok nagy pontosságú leejtése.
Az ejtőernyős csoportok felszabadítását gyakran kíséri a taktikai járműveket, gyorshajókat és egyéb speciális felszereléseket a földre szállító teherplatformok nagy pontosságú leejtése.
Speciális rakomány szállítása
A személyzet ejtőernyős, rakományos és egyéb bevetésén kívül speciális eszközök, beleértve a harci kutyákat, az ejtőernyők továbbra is az MTR legfontosabb elemei maradnak a modern működési környezetben.
A NATO-tag SOF-ek, köztük az Egyesült Királyság és Franciaország, a közelmúltban fejezték be a motorcsónakok tenger felszínére ejtésére tervezett légi szállítórendszerek értékelését. Ezek közé tartozik az Airborne Systems MCADS (Maritime Craft Aerial Delivery System) rendszere, amely akár 12 méter hosszú hajók szállítására is alkalmas, beleértve a brit Holyhead Marine cég 9,5 méteres Offshore Raiding Craft hajóit.
Csónak szállítás
A brit minisztérium 2017-2018-ban összesen 14 platformot vásárol csónakok és csónakok non-stop típusú MCADS szállítására. A PRIBAD 21 (Platform Rigid Inflatable Boat Aerial Delivery) platformok ledobhatók a C-130 Hercules, A400M, C-17 és C-5 katonai szállító repülőgépek hátsó rámpájáról. A francia különleges erők a Zodiac Milpro Ecume RIB-ek szállítására is tesztelték a rendszert.
Ez a lehetőség továbbra is népszerű számos ország MTR-ében, amelyek egységei képesek kishajókat nagy távolságokra szállítani, hogy beszivárogjanak és evakuálják a speciális csoportokat.
A PRIBAD platformos repülőgép rakteréből való kiejtést követően a pilóta csúszdát először a fő tető meghosszabbítására helyezik üzembe. Egyedi ejtőernyőjükön, például RA-1-en a rakományt követve egy speciális csoport ugrik. Harci körülmények között a fröccsenés utáni művelet titkosságának biztosítása érdekében a PRIBAD rendszer raklapja elárasztható, bár a harci kiképzés során a raklapok általában a felszínen maradnak a speciális, újrafelhasználható úszók miatt.
Emellett a brit védelmi minisztérium hasonló technológiát fontolgat a taktikai járművek és egyéb felszerelések biztonságos leszállására. 2016-ban a harci egységek értékelték az Airborne Systems által gyártott közepes feszültségű ejtőernyőt (MSP), amely akár 3175 kg-os rakomány leszállására is képes, amely lehetővé teszi különféle lövedékek dobását. járművek, köztük a Polaris Defense MRZR-2 és MRZR-4 speciális járművei.
A PRIBAD 21 platformhoz hasonlóan az MSP pilóta csúszda egy pneumatikusan párnázott pod fő előtetőjét helyezi el, amely képes biztonságosan a földre juttatni a taktikai járműveket. Az MSP rendszert C-130J és A400M katonai szállító repülőgépekről történő leszállásra tervezték.
A védelmi minisztérium azonban már igyekszik lecserélni a frissített MSP technológiát az Airborne Systems ATAX légszállítási rendszerére, amely 7260 kg-os maximális tömegű rakomány szállítására képes. Az ATAX rendszert úgy tervezték, hogy földi és offshore platformok, bár védelmi források nem tudták megerősíteni, hogy mikor kerül sor az új rendszerekre.
Ahogy Bast elmagyarázta, a CPS kifejlesztette a Complete Parachute Autonomous Delivery System egy másik változatát, amelyet 115-270 kg közötti ultrakönnyű rakomány szállítására terveztek.
Kezelt rakomány
„Ez a menedzselt kézbesítési rendszer azt is biztosítja magas szint a leszállás pontossága egy adott ponton, és általában a távolugrást végző csoportok használják a harci küldetés hatékonyságának növelésére. További lehetőségeket biztosít a kutató-mentő csapatok számára a szükséges egészségügyi eszközök és mentési eszközök pontos eljuttatására” – folytatta, rámutatva arra is, hogy a humanitárius segítségnyújtás és a katasztrófa-elhárítási műveletek területén is szükség van ilyen katonai szakemberekre.
„Sok védelmi minisztériumi egységnek MFF (katonai szabadesés) állománya van arra is megbízva, hogy természeti katasztrófákra reagáljon távoli, nagyon korlátozott leszállózónákkal rendelkező területeken. Az Everest rendkívül zord körülmények között folyamatosan tesztelt MS-360 ejtőernyő szárnya rendkívül hatékony „univerzális ejtőernyőnek” bizonyult, amely lehetővé teszi a mentőcsapatok számára, hogy pontosan leszálljanak korlátozott leszállási területeken” – magyarázta Bast. Azt is megjegyezte, hogy az Egyesült Államok Erdővédelmi Ügynökségének ejtőernyős tűzoltó egységei megkezdték az átállást a meglévő körejtőernyőkről a CPS CR-360 siklóernyőkre, hogy pontosabban szállítsák a személyzetet a kijelölt területekre.
 A pozitív önazonosítás érdekében infravörös fénnyel jelölt precíziós szállító rakományplatformok közelednek a leszállóhelyhez
A pozitív önazonosítás érdekében infravörös fénnyel jelölt precíziós szállító rakományplatformok közelednek a leszállóhelyhez
kutya munka
Nem szabad megfeledkezni a munkakutyák (vagy K-9) működési területre történő szállításáról sem, amelyeket az ejtőernyős rendszereken, például siklóernyőn telepített kezelőkhöz "erősítenek". Ahogy Bast kifejtette, a K-9 használata a kutatási, mentési és harci műveletekben exponenciálisan megnőtt az elmúlt években, mivel az SOF egységek nagymértékben támaszkodnak a kutyákra a legkülönfélébb feladatokban, kezdve a megfigyeléstől/felderítéstől a közvetlen harcig, a katonai és humanitárius feladatokig. segítségnyújtás, segítségnyújtás vészhelyzetekben.
A CPS kifejezetten két megoldást fejlesztett ki, a K-9 Jump Bag és Mannequin Solutiont a nemzetközi CCO közösség számára a műveletek és a kiképzési forgatókönyvek támogatására, beleértve a tandem kutyaugrásokat is.

A nagy magasságú ugrásokhoz készült CPS-termékek listája, amelyek közül sok különböző országok MTR-jével működik, erősítéseket is tartalmaz, mint például ejtőernyős zsinórok, merevítők és vonalrögzítések. Emellett a vállalat portfóliójába tartoznak az MS, M1 és M2 ejtőernyők sorozata is, amelyeket kifejezetten „nagyszámú bevetésre terveztek, kiváló stabilitást, manőverezhetőséget és megnövelt hatótávolságot biztosítanak”.
„Az MS M1/M2 modelleket jelenleg a különleges erők használják szerte a világon, és fékrendszerek segítségével korlátozott területeken is le tudnak szállni. különböző típusú– mondta Bast. Az MS-M4-et úgy jellemezte, mint egy olyan rendszert, amely távolugrásra és zsinórral is használható, ellentétben az MS-M1 és MS-M2 típusokkal, amelyek csak távolugrásra valók.
„Az MS-360-M4 ugróejtőernyő az MS-M2 továbbfejlesztett változata. A siklási teljesítmény jelentősen, több mint 33%-kal javult, ami lehetővé tette számunkra, hogy a konfigurációtól és a terheléstől függően 3,5:1 és 4:1 közötti aerodinamikai minőséget (relatív siklási tartomány) érjünk el.”
„Kísérleti programunk kimutatta, hogy a meglévő MS ejtőernyők kialakításának néhány apróbb módosítása, főként a tető és a kapcsolók alakjának változtatása javította az emelés-ellenállás arányt. Az MS-M4 vegyes kialakításon alapul, a poliészter felfüggesztési vonalak megtartásával kiküszöbölték a zsinórhosszabbítással járó nem kívánt rezgéseket, amelyek befolyásolhatták a siklás minőségét” – magyarázta Bast.
MS-360-M4 ejtőernyő kupola területe 33 m 2, szárnyfesztávolsága 9 méter, akár 205 kg teherbírásra is képes. Ezzel 10 500 méteres magasságból (normál utasszállító repülési magasságból), és (kis igazítás után) minimum 900 méteres magasságból ugorhatsz.
Közben, Orosz különleges erők kezdett kapni különleges Arbalet-2 ejtőernyős rendszer az Atomerőmű Zvezda fejlesztette ki. A védelmi minisztérium szerint a különleges erők dandárjainak orosz különleges erői 2016-ban sarkvidéki körülmények között tesztelték a berendezéseket, és kétéltű leszállásokat hajtottak végre alacsony magasságból, hogy gyorsan bejussanak meghatározott területekre.
A Zvezda cég szerint az Arbalet-2 speciális célú ejtőernyős rendszerrel repülőgépről és helikopterről egyaránt 350 km/h repülési sebességgel ugorhat; 160 kg-ig terjedő repülési súlyával 4000 méteres magasságig megbízható működést biztosít.
 Speciális Arbalet-2 ejtőernyős rendszer
Speciális Arbalet-2 ejtőernyős rendszer
Legfeljebb 5 m/s függőleges és legalább 10,5 m/s vízszintes ereszkedési sebességével az Arbalet-2 siklóernyő kiváló manőverezőképességgel rendelkezik (360 fokos fordulat akár 8 másodperc alatt), beleértve a egyenletes ereszkedés viharos légkörben. Az ejtőernyőt egy kézi bevetési link is aktiválja, akár jobb, akár bal kézzel.
Mivel a közös hadműveleti térben továbbra is nagy hangsúlyt fektetnek az SOF használatára, fejlett képességekre van szükség ahhoz, hogy a személyzetet a harci műveletek összetett területeire szállítsák. A nagy magasságból végrehajtott ejtőernyős támadás továbbra is az adott területeken titkos leszállásra törekvő különleges erők fő taktikai technikája marad. Az ejtőernyős rendszerek aerodinamikai tulajdonságainak folyamatos javítása lehetővé teszi a légi közlekedés támogatását a leszálló csoportok biztonságos távolságból és biztonságos magasságból történő telepítéséhez, és minimálisra csökkenti az ellenséges légvédelmi rendszerek, különösen az ember által hordozható légvédelmi rakétarendszerek lövedékeinek kockázatát.



